17.4 Codifica di canale
Dopo aver analizzato i risultati che la teoria dell’informazione fornisce a riguardo delle migliori prestazioni ottenibili, proseguiamo il discorso iniziato al §
15.6.2.1 su come aggiungere ridondanza
ad un flusso binario a velocità
fb da trasmettere su di un canale numerico, in modo da realizzare una protezione
fec capace di ridurre la probabilità di errore per bit
Pe in ricezione. Ricordiamo che al §
17.2 abbiamo mostrato come, aumentando il ritardo di codifica, la probabilità di errore può essere resa piccola a piacere, purché
fb = R < C, essendo
C la capacità di canale. Mentre una soluzione basata su segnalazione ortogonale (ad esempio, l’
fsk del §
16.5.1) determina un aumento asintoticamente
esponenziale della banda occupata, le tecniche illustrate nel seguito consentono di mantenere la relazione tra grado di protezione e banda occupata di tipo
proporzionale.
Classificazione delle tecniche di codifica di canale
Una categoria molto vasta è quella dei codici
a blocco, che operano suddividendo il messaggio da proteggere in blocchi disgiunti, codificati in modo indipendente; una diversa classe è quella dei codici
convoluzionali, che invece trattano il messaggio come una sequenza priva di suddivisioni, da cui
calcolare una nuova sequenza (a velocità maggiore) che ne rappresenta la codifica. Mentre i codici convoluzionali sono descritti al §
17.4.2, la trattazione dei codici a blocco è iniziata al §
15.6.2.1, che si suggerisce di consultare prima di proseguire, riassumendone qui solo alcuni concetti.
Tasso di codifica, velocità binaria ed
Eb⁄N0
Riprendiamo la notazione introdotta al §
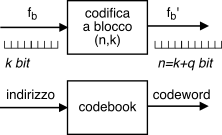
15.6.2.1 per i
codici a blocco, in cui ad ogni
k bit della sequenza di ingresso (da proteggere)
si genera una
codeword con lunghezza
n = k + q > k bit, in cui sono stati
aggiunti q bit
di protezione in funzione dei
k del blocco: tale procedura viene indicata come
codice (n, k), la cui efficienza è misurata dal
tasso di codifica (o
code rate)
Rc = kn < 1
che rappresenta la frazione di bit informativi sul totale di quelli trasmessi, nonché
l’inverso del fattore di
espansione di banda: la nuova velocità di trasmissione in presenza di codifica vale infatti
f’b = fbRc
Osserviamo che all’aumento della velocità di segnalazione (essendo
f’b > fb) corrisponde una eguale diminuzione del rapporto
Eb⁄N0 = PxN0f’b = RcPxN0fb, e conseguentemente si assiste ad un
peggioramento della probabilità di errore
grezza del decisore: pertanto, la capacità correttiva del codice deve essere tale da compensare anche questo aspetto. Per mantenere limitato l’effetto descritto, così come l’espansione di banda, vorremmo trovare codificatori per cui
Rc sia il più possibile vicino ad uno.
Distanza di Hamming, distanza minima e capacità correttiva
Al §
391 è stata definita
dH(xi, xj) come il numero di bit in cui le codeword
xi e
xj differiscono, pari al numero di errori sul bit necessario affinché una si trasformi nell’altra. Valutando la distanza di Hamming
dH tra tutte le possibili coppie di codeword, si definisce la
distanza minima del codice dm = mini ≠ j dH(xi, xj), che descrive quanto le codeword siano
vicine nel caso peggiore.
Esempio Con k = 4 e q = 3 esistono 24 = 16 codeword su 27 = 128 possibili configurazioni degli n = k + q bit della codeword. Ciò significa che ci sono 23 = 8 non-codeword per ogni codeword. Sarebbe bene scegliere queste ultime in modo che risultino distanti (nel senso di Hamming) l’una dall’altra!
Come discusso al §
393, la capacità di correzione del codice è direttamente legata alla
minima distanza dm, sussistendo le relazioni
- per rivelare l (o meno) errori per codeword occorre dm ≥ l + 1
- per correggere t (o meno) errori per codeword occorre dm ≥ 2t + 1
Un codice è tanto più
potente quanti più errori è in grado di correggere, e dunque deve possedere
dm elevato. In un codice a blocchi
(n, k) i
k bit del messaggio originale assumono tutte le configurazioni possibili, e quindi contribuiscono alla distanza tra codeword per un solo bit; per ottenere
dm > 1 occorre pertanto sfruttare gli
n − k = q bit di protezione, portando a scrivere
dm ≤ q + 1 = n − k + 1
che evidenzia la relazione tra
dm e la quantità di bit aggiunti
q. L’uguaglianza sussiste solo per una particolare classe di codici tra cui il codice a ripetizione, discusso al §
15.6.2.2, che adottando una dimensione di blocco in ingresso
k = 1 ha però un tasso di codifica
Rc = k⁄n = 1⁄n molto inefficiente.
La distanza
dm ed il tasso
Rc non possono essere scelti
indipendentemente, dato che per aumentare
dm occorre aumentare i bit di protezione
q, a cui corrisponde una diminuzione del valore di
Rc. Una quantità che tiene conto di entrambi i termini è il
guadagno di codifica asintotico
che esprime il fattore di aumento della potenza di segnale che avrebbe prodotto lo stesso miglioramento in termini di
Pe dovuto all’adozione del codice.
Esempio Se Gc = 2 significa che l’uso del codice porta ad un valore di Pe pari a quello ottenibile con una trasmissione a potenza doppia, ma non codificata.
Tale risultato è valido nel caso di
soft-decoding (pag.
1), ed è aggettivato come
asintotico in quanto è valido solo per valori di
Eb⁄N0 elevati: infatti all’aumentare della potenza di rumore, per qualunque codice e metodo di decisione il valore di
Gc si riduce, fino a divenire inferiore ad uno, quando gli errori sono così numerosi da non poter più essere corretti.
Mostriamo ora soluzioni che consentono di ottenere un adeguato potere di correzione, senza per questo aumentare di molto la velocità di trasmissione del flusso codificato.
17.4.1 Codifica a blocco
Le proprietà di questa classe di codici possono essere meglio analizzate interpretando l’insieme delle possibili codeword da un punto di vista algebrico, ed adottando una notazione matriciale idonea a descrivere la classe di codici
a blocco, mentre per la sottoclasse dei codici
ciclici (§
17.4.1.2) interviene una notazione polinomiale.
Iniziamo ricordando che il
codebook (§
15.6.2.1) di un codice a blocco
(n, k) è composto da sequenze di
n bit indicate come
codeword x espresse mediante un
vettore ad elementi binari
x = (x1 x2 ⋯ xn)
che può assumere solo
2k diversi valori tra i
2n possibili, mentre le ricezione di una delle rimanenti
2n − 2k combinazioni di bit segnala la presenza di almeno un errore. Ad esempio per un codice a ripetizione 3:1 (§
15.6.2.2, in cui
k = 1 ed
n = 3) vi sono solo due codeword con vettori
x1x2x3 pari a 000 ed 111, mentre le restanti 8-2=6 configurazioni
non sono codeword.
Un codebook (che implementa un codice) è detto
lineare se le sue
2k codeword costituiscono uno
spazio lineare (§
2.4.2), ovvero se comprendono la codeword nulla, e la somma di due codeword è anch’essa una parola di codice. La somma tra due codeword è definita in base alla matematica binaria
modulo due, ovvero espressa mediante l’operatore di
or esclusivo bit a bit
⊕ come
Notiamo incidentalmente che, in virtù dell’algebra modulo 2 indotta dall’operatore
⊕, la somma tra vettori binari produce un nuovo vettore con elementi pari ad uno nelle posizioni in cui essi differiscono, dunque in numero pari alla
dH tra i vettori.
Distanza
dm per codici lineari
Definiamo ora
peso w(z) di una codeword
z il numero di
uni in essa contenuti, ovvero la sua distanza di Hamming rispetto alla
cw nulla, cioè
w(z) = dH(z, 0). Per un codice lineare la minima distanza
del codice
dm può essere valutata come il
minimo peso tra tutte le codeword non zero, ossia
dm = minz ≠ 0 [w(z)]
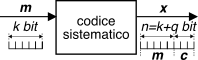
Codice sistematico e rappresentazione matriciale
Con il termine
sistematico si intende un codice che ottiene gli
n bit delle codeword
x concatenando per primi i
k bit da proteggere, indicati con
m, a cui seguono i
q = n − k bit di protezione, indicati con
c. Ovvero come abbiamo implicitamente assunto fino ad ora, anche se si tratta
di una scelta per nulla scontata. Mostreremo più sotto che un codice sistematico è anche lineare; le sue codeword vengono quindi scritte nella forma
x = (m1 m2 ⋯ mk c1 c2 ⋯ cq)
ovvero come un vettore riga partizionato
x = (m| c), in modo da poterlo calcolare a partire dal vettore
m dei bit da proteggere moltiplicando lo stesso per una
matrice generatrice k × n con struttura generale
G = [Ik| P], in cui
Ik è una matrice identità
k × k e
P è una sotto-matrice di elementi binari
k × q. Le codeword si ottengono quindi come
x = m ⋅ G, ovvero
in modo che
P produca i
q bit di protezione come
c = m ⋅ P, in cui sono valide le normali regole di moltiplicazione tra matrici, tranne per l’accortezza di usare la
somma modulo due anziché quella convenzionale. Il valore della (generica)
j-esima (
j = 1, 2, ⋯, q) componente di
c si calcola pertanto come
cj = m1 ⋅ p1j ⊕ m2 ⋅ p2j ⊕ ⋯ ⊕ mk ⋅ pkj
in cui il prodotto tra cifre binarie equivale all’operatore logico di
and.
Esempio Se poniamo
m = (1 0 1) e
p = (0 1 1) il relativo prodotto interno vale
m ⋅ p = 0 ⋅ 1 ⊕ 1 ⋅ 1 ⊕ 1 ⋅ 0 ⊕ 0 ⋅ 1 ⊕ 1 ⋅ 1 = 0 ⊕ 1 ⊕ 0 ⊕ 0 ⊕ 1 = 0
In definitiva ciascuna colonna di
P individua un sotto-insieme di elementi di
m su cui calcolare una
somma di parità, fornendo il motivo per cui questo sotto-blocco di matrice
G è rappresentato dalla lettera
P. Ma non è ancora stato detto nulla che ci possa aiutare a scegliere i coefficienti
pij allo scopo di ottenere i valori
dm e
Rc desiderati: il
codice di Hamming (§
17.4.1.1) ci fornisce una possibile soluzione.
Linearità di un codice sistematico
La linearità di un codebook sistematico può essere verificata se riusciamo a mostrare che la somma di due qualunque codeword è ancora una parola del codebook. A tale scopo, dato che la somma modulo due tra vettori binari
x1 ⊕ x2 avviene bit per bit (eq.
(21.106)), consideriamo le due parti
m e
c di una codeword
x in modo indipendente. Dato che
m può assumere una qualunque delle
2k configurazioni possibili, è sempre vero che
m3 = m1 ⊕ m2 appartiene allo stesso insieme. Per quanto riguarda i
q bit di protezione
c, osserviamo che
c3 = c1 ⊕ c2 = m1 P ⊕ m2 P = (m1 ⊕ m2) P
e dunque
c3 corrisponde alla protezione di
m3, ovvero
x3 = ( m3| c3) è una codeword esistente.
17.4.1.1 Codice di Hamming
E’ un codice a blocco
(n, k) sistematico e lineare che permette di conseguire un tasso di codifica elevato pur mantenendo un buon potere correttivo. Aggiunge
q ≥ 3 bit di controllo ai
k bit informativi per formare codeword di lunghezza complessiva
n = 2q − 1
ottenendo un tasso di codifica pari a
Rc = kn = n − qn = 1 − q2q − 1
che aumenta con il crescere di
q, come mostrato in tabella. Le sue codeword si individuano ponendo
le k righe della sottomatrice
P pari a tutte le parole di
q bit con
due o più uni, in qualsiasi ordine. Ma la cosa
ancora più simpatica è che per un codebook
siffatto si ottiene una distanza di Hamming minima
dm = 3, indipendentemente dalla scelta di
q.
Esempio: codice di Hamming
(7, 4). Corrisponde al caso più semplice di scegliere
q = 3, e dunque
n = 23 − 1 = 7 e
k = 7 − 3 = 4. Una possibile matrice generatrice è pari a
G = ⎡⎢⎢⎢⎢⎢⎣ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ||||||| 1 0 1 1 1 1 1 1 0 0 1 1 ⎤⎥⎥⎥⎥⎥⎦
a cui corrispondono le seguenti
24 = 16 codeword, per ognuna delle quali si è evidenziato il peso confermando che
dm = 3.
-
Dato che sia m che c assumono tutte le configurazioni possibili, è verificata la linearità del codice (pag. 1), ossia che la somma di una qualunque coppia di codeword corrisponde ad una terza codeword. Notiamo infine che ciascuna della 2q = 8 triplette di protezione c viene usata nel codebook per due volte, ma associata a coppie di sequenze m da proteggere con valori di distanza di Hamming almeno pari a tre.
Correzione basata sulla distanza
Indichiamo ora con
y la parola di codice ricevuta; in presenza di errori, risulta
y ≠ x. Il metodo
diretto per rivelare ed eventualmente correggere gli errori presenti è quello di confrontare gli
n bit ricevuti con tutte le possibili
2k codeword, e se nessuna di queste risulta uguale ad
y, scegliere la
x̂ con la minima distanza di Hamming, ossia quella per la quale il peso
w(y ⊕ x̂) è minimo, ovvero
x̂ = argminx{w(y ⊕ x)}
Correzione basata sulla sindrome
Un metodo che non richiede una ricerca esaustiva si basa invece sul calcolo della cosiddetta
sindrome, ottenuta mediante moltiplicazione del vettore
y ricevuto per una matrice
n × q di
controllo parità H, definita come
H = ⎡⎣PIq⎤⎦ in cui
P è la stessa matrice di parità utilizzata nella matrice generatrice
G, e
Iq è una matrice identità di dimensioni
q × q. La matrice
H esibisce la simpatica proprietà che, se moltiplicata per una qualunque codeword valida, fornisce un vettore
nullo di dimensione
q, ossia
Al contrario, se moltiplicata per un vettore
y non appartenente al codebook, fornisce un vettore detto
sindrome s = y ⋅ H non nullo, e quindi il suo calcolo permette la
rivelazione (nei limiti consentiti da
dm) dell’occorrenza di errori.
Esempio considerando di nuovo il caso di q = 3, la corrispondente matrice di controllo parità H = ⎡⎣PIq⎤⎦ è mostrata a lato. E’ facile verificare che per tutte le possibili codeword x (ad es. x = [0100111]) si ottiene x ⋅ H = [000]. Poniamo ora che si verifichi una sequenza di errore e = [0010010], dando luogo alla ricezione della parola y = x ⊕ e = [0110101]: per essa si ottiene una sindrome s = y ⋅ H = [100].
Per quanto riguarda la
correzione, iniziamo scrivendo il vettore ricevuto come
y = x ⊕ e, dove
e è un vettore di
n bit le cui componenti sono diverse da zero in corrispondenza dei bit errati di
y. Il calcolo della sindrome fornisce allora
s = y ⋅ H = (x ⊕ e) ⋅ H = x ⋅ H ⊕ e ⋅ H = e ⋅ H
visto che come espresso dalla
(21.108), la sindrome delle codeword è nulla. Ma dato che la sindrome ha dimensione di
q elementi, tutte le
2n possibili sequenze di errore
e danno luogo a sole
2q diverse sindromi, e quindi la conoscenza della sindrome non consente di risalire direttamente ad
e. Osserviamo però che, riprendendo i risultati esposti al §
15.6.1.1, la probabilità
P(m, n) che si siano verificati
m errori su
n bit decresce al crescere di
m, e pertanto il vettore
ê che con maggior probabilità ha prodotto ognuna delle
2q sindromi
s ≠ 0, è quello (tra tutti quelli che producono la stessa
s) con il minor peso:
ê = argmine : e ⋅ H = s {w(e)}
Osserviamo inoltre che il vettore di errore
più probabile e con
peso minimo è quello con
un solo bit diverso da zero; indichiamo tali
n possibili vettori di errore come
ei (
i = 1, 2, ⋯, n), qualora solo l’
i − esimo bit (di
n) sia pari ad uno. Accade poi che (per costruzione) la sindrome
si associata ad
ei, calcolata come
si = ei ⋅ H, corrisponda esattamente all’
i − esima riga tra le
n righe di
H. Pertanto l’indice
i della riga che corrisponde alla sindrome calcolata, identifica l’indice del bit che ha subito errore.
Notiamo infine che se si verificano più errori di quanti
dm permetta di correggere, è inutile (anzi dannoso) cercare di eseguire la correzione, perché il numero di errori complessivo può risultare ancora più elevato. Nel caso del codice di Hamming in cui
dm = 3 si può correggere un solo errore per codeword, in accordo alla procedura discussa. Se invece
e contiene
due errori, la sua moltiplicazione per
H produce comunque una delle
2q possibili sindromi, ed il tentativo di correzione produce un vettore
x̂ contenente
tre errori.
Esempio Un gruppo di bit
1001 è protetto dal codice di Hamming di pag.
1 producendo
x = 1001110, mentre in ricezione si osserva
y = 1101110. Il calcolo della sindrome
s = y ⋅ H fornisce il risultato
s = 111, che corrisponde alla seconda riga di
H, ovvero al vettore di errore
ê = 0100000, cioè proprio quello che si è verificato. Se invece avvengono
due errori, e si riceve ad es.
y = 1111110, si ottiene
s = 101, a cui corrisponde
ê = 1000000, e quindi il calcolo
x̂ = y ⊕ ê produce ora
x̂ = 0111110, che appunto contiene tre errori.
Esercizio Un flusso binario con codifica di Hamming
(31, 26) è affetto da
Pe = 10 − 4. Determinare la probabilità
residua di errore
sul bit (pag.
1) dopo decodifica.
Risposta La presenza di un solo errore nella codeword viene corretta, mentre con due errori la correzione basata sulla sindrome ne sbaglia tre; il caso con più di due errori si considera improbabile, vedi §
15.6.1.1. La prob. di 2 errori su 31 è (eq.
(21.27)) pari a
P(2, 31) ≃ 31 ⋅ 302 (Pe)2 = 4.65 ⋅ 10 − 6, e l’evento di errore comporta 3 bit errati su 26 decodificati, dunque per la
Pbite residua si ottiene come
326 ⋅ 4.65 ⋅10 − 6 = 5.36 ⋅ 10 − 7.
Anche questo appartiene alla famiglia dei codici lineari a blocco, con la condizione aggiuntiva che se
x = (x1, x2, ⋯, xn) è una codeword lo sono anche tutti i suoi
scorrimenti ciclici, ovvero le codeword
x(1) = (x2, x3, ⋯, x1), x(2) = (x3, x4, ⋯, x2), ⋯, x(n) = (xn, x1, ⋯, xn − 1)
In tal caso sussistono delle proprietà algebriche aggiuntive che si basano sulla teoria dei
campi di Galois, i cui elementi sono polinomi
x(p) = x1pn − 1 + x2pn − 2 + ⋯ + xn − 1p + xn
nella variabile
p, con coefficienti binari definiti a partire dagli elementi delle codeword
x; per tale motivo, i codici ciclici sono detti anche codici
polinomiali: senza volerci addentrare nei particolari della teoria, citiamo direttamente i principali risultati.
Un codice ciclico
(n, k) è completamente definito a partire da un
polinomio generatore
g(p) = pn − k + g2pn − k − 1 + ⋯ + gn − kp + 1
di grado
n − k che deve essere un divisore di
pn + 1, ovvero tale che
pn + 1⁄g(p) = q(p) con resto nullo. Una volta definito
g(p) è possibile ottenere la matrice generatrice
G del codice in forma
sistematica G = [Ik| P], calcolando le
k righe di
P come i coefficienti del polinomio
resto della divisione tra
pi e
g(p), con
i = n − 1, n − 2, ⋯, n − k.
Esempio Troviamo la matrice generatrice in forma sistematica per un codice ciclico
(7, 4). Osserviamo innanzitutto che
pn + 1 si fattorizza come
p7 + 1 = (p + 1)(p3 + p2 + 1)(p3 + p + 1), e scegliamo
g(p) = p3 + p2 + 1 come polinomio generatore. Il calcolo di
pi⁄p3 + p2 + 1 per
i = 6, 5, 4, 3 fornisce come resti i polinomi
p2 + p,
p + 1,
p2 + p + 1,
p2 + 1, pertanto la matrice generatrice risulta
G = ⎡⎢⎢⎢⎢⎢⎣ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ||||||| 1 1 0 0 1 1 1 1 1 1 0 1 ⎤⎥⎥⎥⎥⎥⎦. Osserviamo che, a parte una permutazione, le righe di
P sono le stesse di quelle che definiscono il codice di Hamming di pag.
1: infatti, Hamming rientra anche nella classe dei codici ciclici.
D’altra parte nel caso di un codice ciclico le codeword
x associate ai bit
m da proteggere si possono ottenere non solo utilizzando
G come descritto dalla
(21.107), ma anche in base alla seguente proprietà: indicando con
m(p) = m1pk − 1 + m2pk − 2 + ⋯ + mk − 1p + mk
il polinomio associato ai
k bit da codificare, il polinomio associato alla corrispondente codeword
x si ottiene come
il prodotto x(p) = m(p) ⋅ g(p), e quindi gli elementi
xi della codeword sono individuati calcolando la
convoluzione discreta tra i coefficienti di
m(p) e
g(p):
xi = ∑kj = 1mjgi − j + 1 per
i = 1, 2, ⋯, n, operazione che può essere realizzata mediante un filtro
fir con coefficienti dati dai valori
gi.
Notiamo infine che nel testo si è già incontrato un codice polinomiale (e quindi ciclico) al §
15.6.3.3 a proposito del
crc: i
q bit di protezione possono quindi essere anche ottenuti mediante l’utilizzo di un registro a scorrimento controreazionato, e lo stesso può essere usato anche per il calcolo della sindrome dal lato ricevente.
Prende il nome dalle iniziali dei rispettivi inventori, e rappresenta una sottoclasse dei codici ciclici, in grado di correggere fino a
t < n errori: per ottenere questo risultato occorre scegliere un numero di bit di protezione
q ≤ mt in cui
m ≥ 3 è un intero, una lunghezza delle codeword pari a
n = 2m − 1, ed un polinomio generatore
g(p) di grado massimo
mt le cui radici sono potenze dell’elemento primitivo
α del campo di Galois
GF(2m). In tal caso si ottiene
dm ≥ 2t + 1, e la capacità di correggere fino a
t errori. Nel caso in cui
t = 1, si ricade nel caso dei codici di Hamming. La fase di correzione degli errori può essere realizzata mediante il calcolo di una sindrome, per mezzo di una matrice di controllo
H realizzata a partire dalle potenze dell’elemento primitivo
α, o sfruttando nuovamente proprietà algebriche, che eventualmente si traducono in soluzioni circuitali basate su registri a scorrimento controreazionati. Inoltre, è anche possibile applicare l’algoritmo iterativo di
Berlekamp-Massey.
17.4.1.4 Codice di Reed-Solomon
Si tratta di un sottoinsieme dei codici
bch, caratterizzato da parole di codice ad elementi
non binari ma bensì
L-ari, con
L che deve essere una
potenza prima; scegliendo
L = 2k ogni elemento (o simbolo) del codice corrisponde a
k bit.
Un codice di
Reed Solomon (N, K) produce codeword di
N simboli
L − ari ogni
K simboli (ognuno di
k bit) di informazione prelevati da
m; esistono formulazioni
in grado di produrre codebook sia di natura sistematica che non. La minima distanza del codice è pari a
dm = N − K + 1, ed i metodi di decodifica (su cui non ci addentriamo) permettono di correggere fino a
t = dm − 12 = N − K2 simboli
L − ari per codeword; qualora
la posizione dei simboli errati sia nota può correggere il doppio dei simboli, ossia
2t. Dato che opera a livello di simbolo e non di singolo bit, non soffre del problema legato alle sequenze di errore come invece avviene per il codice di Hamming, almeno finché il numero di errori sul bit consecutivi non supera il valore
t ⋅ k, ovvero non coinvolge più di
t simboli.
Esempio Scegliendo k = 8, N = 2k − 1 = 255, t = 16 e K = N − 2t = 223 definiamo il codice RS(255, 223) che protegge K ⋅ k = 1784 bit inserendoli in codeword di N ⋅ k = 2040 bit, di cui 2t ⋅ k = 256 di ridondanza. Tale codice è in grado di correggere fino a 16 simboli ad 8 bit: qualora gli errori sul bit avvengano tutti in simboli differenti si ha il caso peggiore, in cui sono correggibili solamente 16 bit su 2040; viceversa nel caso migliore in cui gli errori sono consecutivi ed iniziano all’inizio di un simbolo, ne corregge fino a t ⋅ k = 128. Il tasso di codifica risulta Rc = K⁄N = 0.937.
Può accadere che i bit che costituiscono il flusso fb di dati da proteggere non sia omogeneo, ma presenti strutture sintattiche e quindi delimitazioni che si desidera riflettere nel flusso codificato; oppure, è il sistema di trasmissione ad imporre strutture di trama a dimensione fissa, e non si desidera frammentare una singola codeword a cavallo di time-slot differenti. In tali casi si omette la codifica (e la trasmissione) di alcuni dei K simboli di informazione, idealmente posti a zero, riducendo così la dimensione N della codeword pur mantenendo la stessa quantità di ridondanza N − K, accettando di ridurre il tasso di codifica Rc.
Esempio Il codice accorciato RS(204, 188) viene ricavato dal RS(255, 239) (con 16 byte di ridondanza) ponendo a zero (e non trasmettendo) 51 dei 239 byte di informazione. Il tasso di codifica passa da 0.937 a 0.921.
In questi casi la codeword viene calcolata, in formato sistematico, a partire da una sequenza informativa fittizia che contiene anche i simboli posti a zero e poi non trasmessi; qualora in fase di decodifica questi risultino diversi da zero, la codeword viene segnalata come errata agli stadi di elaborazione successivi.
17.4.1.5 Codifica concatenata
Come abbiamo fatto notare i codici Reed Solomon riescono a correggere efficacemente errori ripetuti, al contrario di quelli di Hamming, che invece hanno un buon comportamento in presenza di errori singoli. E dato che l’unione fa la forza, è possibile usarli assieme adottando lo schema mostrato in figura
17.15, in cui la prima codifica (di
RS) è detta
esterna perché più lontana dal canale, mentre per converso la seconda (di Hamming) è detta
interna.
Ad ogni simbolo di
k bit della codeword esterna vengono aggiunti
q bit di ridondanza
da parte del codice interno, come mostrato a lato. Gli errori
isolati introdotti da parte del canale sono corretti dal decodificatore interno, e se distanti tra loro per più di
k + q bit, il codice esterno neanche si accorge di nulla; d’altra parte in assenza del codice interno, il solo codice di
RS non sarebbe stato in grado di correggere più di
N − K2 errori per codeword, qualora avvenuti ognuno in un simbolo diverso. Al contrario, in presenza di errori ravvicinati è il codice interno di Hamming a non poter fare nulla, anzi ne introduce di ulteriori, ma nello stesso simbolo: in tal caso il codice esterno di
RS trova gli errori tutti concentrati in pochi simboli, e provvede alla loro correzione.
E’ un nome alternativo dato a questo schema di funzionamento, e riflette il fatto che il tasso di codifica Rc complessivo è il prodotto dei tassi dei due stadi, dando luogo ad una velocità binaria in ingresso al canale pari a f’b = fbRic ⋅ Rec.
Qualora si manifestino sequenze di errore più lunghe di
N − K2 ⋅ k bit, il numero di simboli del codice esterno che risultano errati diviene maggiore di quanto
esso non possa correggere, e lo schema precedente non funziona più. Per evitare questa situazione, tra i due stadi di codifica (e di decodifica) si frappone un blocco di
interleaving (ed il suo inverso) (vedi §
15.6.2.3), come mostrato sopra.
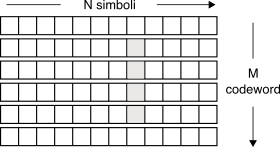
La matrice di interleaving viene scritta per righe, inserendovi per intero M codeword del codice esterno, ed è letta per colonne dalla codifica interna, che vi aggiunge ulteriore ridondanza; dal lato ricevente la stessa matrice viene scritta per colonne con l’uscita della decodifica interna, e letta per righe da parte della decodifica esterna.
Le aree grigie in figura rappresentano una lunga sequenza di errore, che il codice interno non riesce a correggere: finché
M (detto
fattore di interleaving) è maggiore della più lunga sequenza di simboli errati previsti, questi ultimi vanno a finire in codeword (esterne) differenti, e possono dunque essere ancora corretti. Mentre in assenza di interleaver, i simboli errati sarebbero potuti finire tutti dentro la stessa codeword esterna.
Resta una ultima sventura possibile, ovvero la presenza di un disturbo periodico che si presenta alla stessa cadenza (o con un suo multiplo) con cui sono scritte le colonne da parte della decodifica interna. Ciò determina che tutti i simboli di una medesima codeword esterna siano errati, rendendone impossibile la correzione. Per rimediare anche a questa evenienza occorre adottare un metodo di interlevaing detto convoluzionale, il cui funzionamento non viene approfondito, precisando solamente che quello discusso sopra è invece detto interleaver a blocco.
17.4.2 Codifica convoluzionale
A differenza della codifica a blocco, questa tecnica produce una sequenza binaria i cui valori dipendono da gruppi di bit di ingresso
temporalmente sovrapposti, in analogia formale a quanto avviene con l’integrale di convoluzione, che calcola valori di uscita che dipendono da
intervalli di quelli in ingresso, pesati dai valori della risposta
impulsiva. Un generico codice convoluzionale è indicato con la notazione
CC(n, k, K), che lo descrive come capace di generare gruppi di
n bit di uscita (sequenza
{x}) in base alla conoscenza di
K simboli di ingresso (sequenza
{m}), ognuno composto da
k bit.
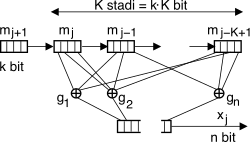
Lo schema strutturale del codificatore, raffigurato a lato, ospita i
K simboli della sequenza di ingresso (di
k bit ciascuno) in un registro a scorrimento in cui per ogni nuovo simbolo
mj che entra da sinistra, i precedenti scorrono a destra, ed il più “vecchio” viene dimenticato. Ognuno degli
n bit di uscita
xj(i),
i = 1, 2, ..., n è calcolato eseguendo una somma modulo
2 tra alcuni dei
k ⋅ K bit di ingresso, individuati da un vettore
generatore gi (
i = 1, 2, ..., n) costituito da una parola binaria di
k ⋅ K bit, zero od uno a seconda se l’
i-esimo sommatore modulo due sia connesso (o meno) al corrispondente bit della
finestra di ingresso.
Il numero L = k ⋅ K di bit che contribuiscono al calcolo della parola di uscita viene indicato come lunghezza del vincolo, mentre la quantità ν = (K − 1) ⋅ k è indicata come memoria del codice per il motivo che vedremo presto. Resta poi valido il concetto di coding rate Rc = kn che rappresenta il rapporto tra quanti nuovi bit di informazione sono necessari in ingresso per ogni gruppo di n bit in uscita dal codificatore.
Automa e diagramma di transizione
Il numero di possibili configurazioni dei bit contenuti nello shift register è finito e pari a 2L = 2K ⋅ k. In base alla scelta degli n vettori gi, ad ogni configurazione corrisponde un unico valore dell’uscita, e ciò comporta che lo schema può essere descritto da una tabella della verità, ovvero da un automa a stati finiti, con annesso diagramma di transizione.
Osserviamo ora che il passaggio da uno stato all’altro non è qualsiasi, ma è stabilito dall’ultimo simbolo in ingresso mj, e pertanto il diagramma di transizione si costruisce individuando i 2ν stati S associati alle possibili combinazioni di bit dei precedenti K − 1 simboli di ingresso. Ad ogni stato competono 2k transizioni, una per ogni possibile mj di ingresso, diretta verso lo stato individuato dalla nuova configurazione di shift-register che si è determinata. Infine, ad ogni transizione è associato in modo univoco il gruppo di n bit xj(mj, Sj) da emettere in uscita. Ma prima che il discorso diventi troppo confuso, procediamo con un esempio pratico.
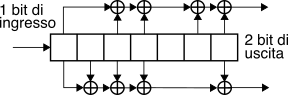
Consideriamo il codice convoluzionale il cui schema è mostrato in fig.
17.21-a), che produce due bit di uscita per ogni bit di ingresso in funzione degli ultimi tre, ovvero
CC(n, k, K) = CC(2, 1, 3), caratterizzato da un tasso di codifica
Rc = kn = 12, da una lunghezza del vincolo
L = K ⋅ k = 3, una memoria
ν = (K − 1) ⋅ k = 2 ed un numero di stati
2ν = 4, da ognuno dei quali si dipartono
2k = 2 transizioni. Se scegliamo come vettori generatori le parole
g1 = (1 1 1) e
g2 = (1 0 1) si ottiene la tabella della verità di fig.
17.21-b), che mostra i valori di uscita
xj(i) ottenuti eseguendo gli
xor descritti dai vettori
gi sulla parola di tre bit costituita dall’ultimo ingresso
mj e dai due precedenti ingressi, indicati come
Sj, e che rappresentano appunto
la memoria del passato all’istante
j. Infine la fig.
17.21-c) rappresenta l’automa ed il diagramma di transizione corrispondente, in cui le transizioni tra stati sono disegnate con linee tratteggiate o continue a seconda se il valore
mj dell’ultimo ingresso sia pari a zero o ad uno, e sono etichettate con la coppia di bit in uscita
xj riportati nella tabella della verità.
Come si può verificare, ogni stato ha
solo due transizioni, e dunque per ogni ingresso sono possibili solo
due valori dei quattro 4 che sarebbero possibili con due bit; inoltre questi valori differiscono in
entrambi i bit. Esempio Con una sequenza di ingresso {m} = {1010} si osserva che, seguendo il diagramma di transizione a partire dallo stato iniziale 00, la sequenza di stati risulta {S} = {00, 10, 01, 10, 01}, mentre quella di uscita è {x} = {11, 10, 00, 10}. E’ d’altra parte possibile anche il procedimento inverso, ossia conoscendo {x} e quindi {S} si può risalire ad {m}, sempre percorrendo le transizioni etichettate con i simboli xj. In definitiva, osserviamo come ad ogni coppia di sequenze ({m}, {x}) sia biunivocamente associata una sequenza di stati {S}.
Per meglio visualizzare le possibili sequenze di stati si adotta una rappresentazione detta
diagramma a traliccio (
trellis) del codificatore, ottenuta a partire dalla
riorganizzazione grafica del diagramma di transizione (fig.
17.21-c)) come mostrato a sin. in fig.
17.22-a). Il traliccio è quello al centro, costituito da
nodi disposti su tante righe quanti sono gli stati dell’automa, e tante colonne quanti sono gli istanti temporali che vogliamo considerare. I collegamenti tra colonne del traliccio corrispondono alle transizioni dell’automa: ponendo uno stato iniziale
Sj = 0 = 00, si costruisce la colonna
j = 1 riportando le due possibili transizioni, tratteggiata o continua a seconda che sia entrato uno zero od un uno, e si etichettano le transizioni con la parola
xj emessa in uscita. Il processo si ripete per tutti gli istanti temporali. In basso in figura è riportata una possibile sequenza codificata
{x} trasmessa, in corrispondenza della quale
l’effettivo percorso attraversato nel traliccio, e dunque la successione di stati
{S} associata, è rappresentato dalle linee
blu e più spesse.
17.4.2.1 Criterio di decodifica
Come già osservato non tutte le sequenze di stati (e di uscite) sono ammissibili; indichiamo con
X il loro insieme. Consideriamo quindi la sequenza
{x̃} osservata all’uscita di un canale rumoroso, e contenente
errori. In virtù dei vincoli, nel caso di errori sufficientemente isolati non esiste una sequenza di stati
{S} in grado di produrre
esattamente la sequenza ricevuta
{x̃}, e la correzione degli errori consiste nel trovare la sequenza
{Ŝ} ammissibile e tale che la corrispondente uscita
{x̂} sia la più
simile a
{x̃}.
La metrica adottata è la
distanza di Hamming dH(^x, x̃) tra le due sequenze, ossia il numero di bit diversi tra le due, ed il criterio di decodifica viene definito come
E’ il nome della tecnica basata sui principi della programmazione dinamica che permette di risolvere il problema
(21.109) senza dover enumerare tutte le sequenze ammissibili
{x} ∈ X.
A tale scopo gli archi del traliccio vengono etichettati come in fig.
17.22-b), con le
dH(xj, x̃j) tra il simbolo
xj associato alla transizione e quello
x̃j ricevuto all’istante
j. Per ogni particolare sequenza di stati
{S} il
costo dH(x, x̃) tra la sequenza ricevuta
x̃ e quella
x associata ad
S è pari alla somma delle
dH(xj, x̃j) che etichettano gli archi attraversati, ossia
Il criterio
(21.109) è dunque equivalente a quello di trovare il percorso
di minimo costo per l’attraversamento di un grafo valutato. Ciò avviene esaminando il traliccio
per colonne da sinistra a destra, e valutando per ciascun nodo (riga) il
miglior costo
parziale tra i diversi percorsi che lo raggiungono.
Esempio Applichiamo l’algoritmo descritto al caso in questione con l’aiuto della figura
17.24 (ottenuta a partire dalla
17.22-b)) che mostra sopra ad ogni nodo il risultato del calcolo del
costo parziale del
miglior percorso che lo raggiunge, ottenuto sommando i costi di attraversamento degli archi (fig.
17.22-b)) che lo compongono, mostrati in corsivo. Ad esempio, lo stato
00 all’istante
j = 3 potrebbe essere raggiunto tramite il percorso tutto
orizzontale che rimane nello stato
00, e che assomma un costo parziale di 4. A questo si preferisce il percorso proveniente dallo stato
01, che ha accumulato (per
j = 2) un costo parziale di 1, a cui sommare
dH(x(S00 ⁄ S01), x̃3) = dH(11, 00) = 2, per un nuovo costo parziale di
3.
All’estremità destra di figura
17.24 viene indicato il percorso di minimo costo, e la corrispondente
dH(x, x̃) minima.
In effetti l’algoritmo calcola solamente la
dH minima, e per risalire alla sequenza di stati (e dunque di uscite) che l’ha prodotta, occorre (per ogni nodo del traliccio) memorizzare l’indice del nodo nella colonna precedente da cui parte l’arco che ha determinato il minor costo locale. Una volta individuato (all’ultima colonna) il nodo in cui termina il percorso di minor costo, svolgendo all’indietro la catena dei puntatori si trova la sequenza di stati
{S} ottima (percorso
verde a tratto spesso), e da questa in base alla fig.
17.22-a) sia la
{m} che la
{x̃}, che come si vede
è quella esatta.
In fig.
17.25 è riportato un esempio di
pseudo-codice che implementa l’algoritmo a partire da tre tabelle
m(p, q),
x(p, q) e
A(p, q), di dimensione
2ν × 2ν, che contengono rispettivamente i valori di ingresso
m e di uscita
x in corrispondenza ad una transizione da
p a
q, ed un valore pari a
1 o
0 a seconda se la transizione esiste o meno.
Il codice opera su di una sequenza di ingresso
x̃ di
J elementi, e ne produce una
m di uguale lunghezza, ma temporalmente invertita. Ovviamente si possono pensare implementazioni molto più efficienti, ma l’esempio ha il solo scopo dimostrativo.
- l’esempio adottato si mostra in grado di correggere un errore pur impiegando un coding rate pari ad 12, migliore (ad es.) di quello ⎛⎝13⎞⎠ del codice a ripetizione;
- la dH del miglior percorso corrisponde al numero di bit errati (nel caso in cui siano stati corretti) nella x̃ ricevuta, il che permette al decodificatore di stimare la qualità del collegamento;
- si verifica errore se esiste una x̂ ≠ x ammissibile e tale che dH(^x, x̃) è minore di dH(x, x̃). In tal caso la sequenza erroneamente decodificata x̂ contiene errori a pacchetto;
- le capacità di correzione del codice migliorano aumentando la dH tra le possibili sequenze {x}. La minima distanza dm tra sequenze codificate è denominata distanza libera, e può essere trovata come la dH tra una {x0} tutta nulla ({x0} = {000000000}) e quella con il minor numero di uni, che si diparte e ritorna (nel traliccio) dallo/allo stato 00: nell’esempio di fig. 17.22a) si ottiene dm = 5. Il decodificatore è in grado di correggere fino a dm − 12 errori che si presentano in un intervallo pari al vincolo del codice L. Il codice del nostro esempio può dunque correggere 2 bit errati su 5;
- la distanza libera dm aumenta con il rapporto Kk, in quanto la matrice di transizione tra stati diviene più sparsa, ed i valori di {x} sono più interdipendenti;
- se il miglioramento di cui sopra è ottenuto aumentando K, ciò equivale ad estendere nel tempo la memoria del codificatore, ma senza per questo alterare il tasso di codifica Rc = kn;
- in presenza di un flusso di dati continuo non ha senso attendere un istante finale (che non esiste) per poter individuare il percorso di minimo costo. In tal caso la decodifica parziale avviene con riferimento ad una colonna del traliccio temporalmente abbastanza lontana dall’ultimo istante j di ingresso, ad es. cinque volte la lunghezza del vincolo L, liberando di conseguenza la memoria occupata dai puntatori precedenti;
- dato che ad ogni istante-colonna sono scartati i percorsi che si incontrano con uno migliore, il numero di percorsi sopravvissuti è sempre pari al numero di stati 2ν;
- all’aumentare del numero 2ν di stati aumenta la complessità e l’occupazione di memoria dell’algoritmo di Viterbi, che può essere sostituito da tecniche di ricerca a fascio (beam search) che estendono solo i percorsi parziali più promettenti, ossia con minor costo parziale.
Letteralmente traducibile come mordendo la coda, è un metodo per rendere un codice convoluzionale simile ad uno a blocchi. Il bitstream di ingresso viene suddiviso in segmenti di m bit, gli ultimi L dei quali sono utilizzati (in ordine inverso) per inizializzare lo shift-register del codificatore, che quindi inizia ad elaborare, uno alla volta e dall’inizio, i bit del segmento. Al suo termine, ovvero quando sarà entrato l’m − esimo bit del segmento, lo stato del codificatore sarà identico a quello con cui ha iniziato: ciò significa che se venisse di nuovo inserito lo stesso segmento (ovvero in forma periodica), si otterrebbe la stessa uscita, che può dunque essere riguardata nel suo insieme come la codeword associata al segmento.
Una variante della tecnica (detta zerotail), anziché inizializzare il codificatore ne azzera lo stato, ed aggiunge L bit pari a zero in coda al segmento, ottenendo lo stesso risultato, a spese di un peggioramento di Rc. Con la tecnica zerotail la decodifica sa che il percorso nel traliccio deve iniziare e terminare con lo stato nullo, e dunque al termine della digestione della codeword associata al segmento si può iniziare il backtraking dei puntatori da li, oppure segnalare la presenza di eccessivi errori, qualora non sia quello il percorso di minimo costo.
Con l’inizializzazione dello stato, invece, il traliccio diviene periodico (alcuni lo definiscono circolare), e l’algoritmo di Viterbi viene fatto lavorare su di una periodizzazione della codeword ricevuta; dopo alcuni periodi si individua lo stato di minimo costo, e recuperati i puntatori (per un periodo-codeword) a partire da quello.
17.4.2.3 Decodifica a decisione soffice
Fino ad ora la decodifica di canale è stata applicata
a valle del processo di decisione, in modo da individuare le codeword come quelle con la minima
distanza di Hamming rispetto al risultato prodotto dal decisore. Se invece la decodifica di linea non esegue nessuna decisione, ma inoltra interi blocchi di
n campioni
y = (y1, y2, ⋯, yn) prelevati dal segnale ricevuto, la decodifica di canale può individuare le codeword trasmesse come quelle con la minima
distanza euclidea dE rispetto a quanto ricevuto, ottenendo prestazioni migliori a spese di un maggior onere di calcolo. Questa tecnica valuta la distanza come
tra i valori (continui)
yj ricevuti e quelli (binari) che si sarebbero dovuti ricevere nell’ipotesi che fosse stata trasmessa la
i − esima delle possibili codeword
xi = (xi1, xi2, ⋯, xin), decidendo quindi per la codeword
x̂ che rende
dE(y, x̂) minima.
Decodifica di massima verosimiglianza
Di fatto minimizzare la distanza
(21.111) equivale a massimizzare la verosimiglianza logaritmica
ln (pn(y ⁄ xi)) dell’ipotesi che sia stata trasmessa la codeword
xi avendo ricevuto la v.a.
n − dimensionale
y affetta da rumore gaussiano
n di varianza
σ2. Infatti considerando i bit incorrelati,
pn(y ⁄ xi) è pari al prodotto delle
pn(yj ⁄ xij) dei singoli bit, e
ln (pn(y ⁄ xi)) diviene una somma, i cui termini
sono legati a quelli (cambiati di segno) che compaiono nella
(21.111), dato che ne il primo termine di
(21.112) ne il denominatore del secondo intervengono nella minimizzazione di
(21.111).
Mentre per un codice a blocchi appare problematico valutare la
(21.111) per tutte le possibili
xi, le considerazioni ora svolte sono invece particolarmente adatte al contesto della codifica convoluzionale, dato che basta sostituire nella
(21.110) la
dH con la
dE per il calcolo dei costi associati ai percorsi nel traliccio esplorato dall’algoritmo di Viterbi. In tal caso si assiste ad un miglioramento di prestazioni (rispetto all’approccio
hard) equivalente ad un aumento di
Eb⁄N0 di circa 2 dB.
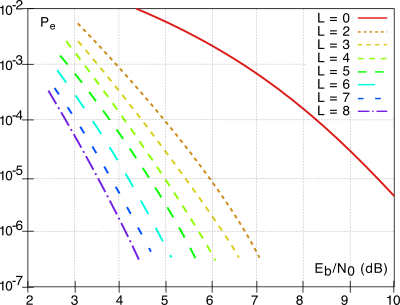
La figura che segue riporta i valori della
Pbite residua
per la decodifica di Viterbi di un
CC con
Rc = 1⁄2 al variare della lunghezza del vincolo
L, il cui bitstream viene trasmesso mediante modulazione
qpsk, in funzione del rapporto
Eb⁄N0 in ricezione. Osserviamo il conseguimento di un guadagno di codifica (pag.
1) che per una
Pe = 10 − 5 va da circa
3.5 a
6 dB per le diverse scelte di
L, che corrispondono a tralicci da 4 a 256 stati.
Oppure, visto nell’altro senso, per un Eb⁄N0 di 5 dB otteniamo una Pe migliore tra 100 e più di 10000 volte rispetto al caso non codificato.
17.4.2.4 Altri schemi di codifica convoluzionale
Lo schema riportato nell’esempio di fig.
17.21 non è l’unico possibile. Anche se permette di variare il tasso di codifica
Rc = kn variando i valori di
k ed
n, questi impattano anche su complessità del traliccio, lunghezza del vincolo
L e distanza libera
dm; per
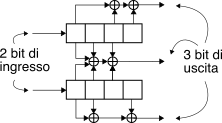
garantirsi la massima libertà di azione sui parametri della codifica, sono state definite anche architetture differenti. Lo schema riportato a lato ad esempio dispone i
k = 2 bit di ingresso su due diversi rami, ed impiegando tre generatori, consegue un tasso
Rc = kn = 23 con
64 stati,
K = 8 ed
L = 8.
Anche se non è stata affrontata la parte di teoria che descrive i
CC in termini di risposta impulsiva e risposta in frequenza, non può sfuggire la similitudine tra le architetture illustrate e quelle dei filtri
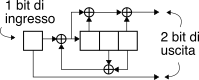
fir, pur se in logica modulo due. Ma esiste anche la possibilità di realizzare un
CC ricorsivo, in cui cioè sono presenti operazioni
xor
all’indietro e non solo in avanti, come nello schema mostrato in figura che consegue
Rc = 1⁄2, e che è anche
sistematico in quanto un bit di uscita su due replica quello di ingresso.
17.4.2.5 Codice perforato
Modificare completamente l’architettura del codificatore non sembra la scelta migliore per poter variare
Rc, dato che ciò comporta la totale modifica del traliccio su cui è basata la decodifica. Una diversa opzione è quella di
omettere del tutto la trasmissione di alcuni dei bit presenti nella sequenza codificata, operazione nota come perforazione (
puncturing) del codice: ad esempio eliminare un bit ogni tre dall’uscita di un
CC con
Rc = 1⁄2 determina un nuovo
Rc = 3⁄4, dato che servono ora tre bit di ingresso per produrne quatto di uscita, anziché sei. Ovviamente in questo
caso le capacità correttive peggiorano, ma il processo di decodifica può aver luogo comunque dato che il ricevitore conosce le posizioni non trasmesse, e per esse considera una distanza
neutra pari a
0.5, come esemplificato alla tabella a lato, dove con
δi si indica la distanza (hard o soft) tra l’
i − esimo bit nella sequenza ricostruita, e le corrispondenti ipotesi espresse dal traliccio.
La percentuale di perforatura può essere resa variabile nel corso della trasmissione in funzione del tasso di errore rilevato, in modo da ridurre la ridondanza nel caso di una buona qualità di ricezione, o mantenerla elevata in caso di peggioramento.
Esempio Lo standard di trasmissione dvb utilizza il CC con due generatori mostrato in figura, con 64 stati, vincolo di lunghezza L=7, dm = 10 e Rc = 1⁄2. Le uscite di entrambi i rami possono essere perforate in accordo allo schema in tabella, che mostra anche la variazione del tasso di codifica e della distanza minima: la posizione degli zeri nella matrice di perforazione indica i bit di cui è omessa la trasmissione.
17.4.2.6 Concatenazione Solomon-Viterbi
La strategia illustrata al §
17.4.1.5 di collegare in cascata un codice
esterno in grado di correggere errori a pacchetto (come il Reed-Solomon) con uno
interno particolarmente idoneo a correggere errori isolati viene impiegata con vantaggio utilizzando come secondo un codice convoluzionale, che come abbiamo illustrato produce errori a pacchetto qualora si eccedano le sue capacità correttive.
E’ precisamente la soluzione adottata per la codifica del segnale
dvb, in cui il
CC dell’esempio precedente è affiancato (tramite un interleaver convoluzionale di profondità 12) da un codice
RS accorciato
(214, 188) derivato dal
(255, 239) (pag.
1) che, con la sua capacità di poter correggere 8 simboli per codeword, porta il tasso di errore
residuo ad una
Pe di
10 − 11 pur in presenza di un
Eb⁄N0 di
3.2 dB.
17.4.2.7 Viterbi con uscite soffici
Quando la decodifica di canale viene fattorizzata su due blocchi in cascata diviene globalmente vantaggioso che il primo dei due possa alimentare il secondo con valori continui, in modo da esprimere l’affidabilità della decisione presa.
Al §
17.4.2.3 abbiamo notato come l’algoritmo di Viterbi alimentato con ingressi soffici di
n campioni
y = (y1, y2, ⋯, yn) pervenga ad una decisione di
massima verosimiglianza a riguardo di una codeword
x̂ ovvero tale che
x̂ = argmaxx p(y ⁄ x), da cui risalire al messaggio
m̂ = (m1, m2, ⋯, mk) associato alla codeword
x̂. Analizziamo ora una sua
variante capace di produrre anche una
probabilità a posteriori p(mj ⁄ y) per ognuno dei bit
mj j = 1, 2⋯, k decodificati, o quantomeno una misura di affidabilità della decisione. Tale variante è denominata SOVA
(
soft output Viterbi algorithm), ed in associazione ad un ingresso soffice, realizza una decodifica detta SISO
(
soft input, soft output).
L’uscita soffice si ottiene associando ad ogni
mj = ± 1 decodificato anche un valore
pj che misura la probabilità che la decisione sia
errata, in modo che l’affidabilità possa essere espressa come
e l’uscita soffice come
Λj = mjLj in cui il segno è la decisione
hard, e la verosimiglianza logaritmica
(21.113) ne esprime il modulo. Vediamo quindi come determinare
pj.
Valutazione della prob. di decisione errata
Adottiamo per semplicità un
CC sui cui nodi del traliccio convergono due sole transizioni, e prendiamo in considerazione un istante
i in cui per ognuno dei
2ν stati
si occorre scegliere tra
due ipotesi di percorso parziale, che indicizziamo con
h = 1, 2. Indicando con
δ un istante del passato per il quale tutti i
2ν percorsi superstiti condividono con elevata probabilità un medesimo
progenitore (vedi fig.
17.30)
la decisione all’istante
i avviene confrontando i costi parziali
in cui
yj è la parola (soft) di
n bit ricevuta all’istante
j ed
x(h)j è la parola (con valori
±1) emessa allo stesso istante dal codice in corrispondenza del
h−esimo percorso. Ricordando quanto discusso al §
17.4.2.3, la
(21.114) è legata in modo diretto alla verosimiglianza logaritmica
− ln (p(y ⁄ x(h))) delle ipotesi
x(h) avendo osservato
y; pertanto è lecito assumere che
Prob{percorso h} ≈ e − Ch h = 1, 2
indicando con
≈ una qualunque relazione monotona crescente. Assumendo ora
h = 1 l’indice del miglior percorso e
h = 2 di quello scartato (e dunque
C1 < C2), la probabilità di aver scelto il percorso
sbagliato è pari a
con
Δ = C2 − C1 ≥ 0. Dunque
psi è pari a
0.5 quando
C2 = C1 mentre tende a zero qualora
C2 ≫ C1; in altre parole quanto più i due costi sono simili, tanto più la decisione potrebbe essere errata.
La misura di affidabilità
(21.115) ci avverte che, qualora la decisione sia errata, allora (con probabilità
psi) sono errate anche le decisioni nei
q istanti in cui i bit di informazione
m nei due percorsi differiscono, ossia
evidenziati in fig.
17.30 da un differente tratteggio, mentre gli istanti
j in cui
m(1)j = m(2)j non sono danneggiati dalla decisione errata. Se abbiamo preventivamente salvato le prob. di errore
p̂j per gli indici espressi dalla
(21.116), queste vengono aggiornate come
ovvero rimangono uguali con prob.
1 − psi, o si aggiornano al nuovo valore
psi con prob.
1 − p̂j di non aver sbagliato all’istante
j.
Differenze rispetto a Viterbi classico
In sostanza l’algoritmo ricalca quello in §
17.4.2.1 e produce le medesime decisioni
hard, ma ognuna corredata dalla verosimiglianza logaritmica
Lj = ln 1 − p̂jp̂j calcolata a partire dai valori ottenuti tramite la
(21.117). Per arrivare a questo risultato occorre memorizzare per ogni istante e per ogni stato, oltre al puntatore al miglior predecessore, anche le differenze
Δ tra i costi, da cui ottenere i valori
p̂j (eqq.
(21.115) -
(21.117)) e
Lj (21.113) in fase di decodifica.
Il metodo esposto trova impiego nella demodulazione di segnali con memoria come la modulazione
a traliccio e
cpm (§
16.10), nella equalizzazione di canali con memoria (§
18.4.5), e come stadio di decodifica interno di una codifica concatenata (§§
17.4.1.5 e
17.4.2.6). Quest’ultimo caso si presta particolarmente bene all’utilizzo di una tecnica convoluzionale anche per il codice esterno, operante ovviamente in modalità soft, e separato da quello interno da un adeguato stadio di interleaving. Lo stadio esterno potrà quindi eseguire eseguire una decodifica di massima verosimiglianza a partire dalla sequenza
Λj = m̂jLj (
m̂j = ±1,
Lj ≥ 0) proveniente dallo stadio
sova interno, decidendo per il messaggio
mdec tale che
Mentre il caso di un codice esterno a blocchi non permette di risolvere agevolmente la
(21.118), consideriamo il caso di un semplice controllo di parità a bit singolo (§
15.6.3.1), e poniamoci nella condizione che lo stesso rilevi la presenza di un bit errato. Anziché invocare una ritrasmissione, può procedere modificando la decisione per il bit a cui corrisponde la massima probabilità di errore, ovvero a cui corrisponde il valore
Lj più piccolo.