2.4 Spazio dei segnali
Esiste un modo di affrontare l’analisi dei segnali rappresentando gli stessi come elementi di uno
spazio vettoriale, estendendo così ai primi le proprietà algebriche e geometriche valide per i secondi. In questa sezione viene prima sinteticamente rivisitata la teoria degli spazi algebrici per i quali è definito un operatore di prodotto scalare, e quindi individuate le possibili corrispondenze tra le proprietà dei vettori e quelle dei segnali, riuscendo così a realizzare una sintesi unificante in relazione ai concetti di
base di rappresentazione,
ortogonalità, e
trasformazione unitaria. Si accenna infine a come molti degli integrali che sono studiati nel testo (trasformata di Fourier e di Hilbert, convoluzione, correlazione) possano essere ricondotti al calcolo di un
prodotto scalare, a sua volta associato al concetto di
operatore funzionale, ossia di funzioni che dipendono da una seconda funzione.
2.4.1 Spazio metrico
Consiste in un insieme
A di elementi (qualunque) per il quale esiste un modo per valutare la
distanza (o
metrica) tra elementi, ossia un operatore
d(x, y) che associa ad ogni coppia di elementi
x, y ϵ A un numero
reale, e per il quale
- d(x, y) ≥ 0 - nulla solo se x = y
- d(x, y) = d(y, x) - simmetria
- d(x, y) ≤ d(x, z) + d(z, y) - disuguaglianza triangolare
La distanza è un concetto topologico che permette di definire l’intorno di un punto nello spazio.
Identifica uno spazio metrico in cui il limite a cui tende una successione fa parte dell’insieme stesso. Uno spazio metrico non completo è sempre contenuto in uno spazio completo più grande, che ne costituisce il completamento, come ad esempio l’insieme dei numeri razionali è contenuto nell’insieme (completo) dei numeri reali, ottenuto dal primo con l’aggiunta dei numeri irrazionali.
2.4.2 Spazio lineare
Un insieme A di elementi viene detto spazio lineare (o spazio vettoriale) su di un campo K, quando sono definite le operazioni di somma tra elementi x, y ϵ A e di moltiplicazione degli stessi per dei coefficienti λ ∈ K, e queste due operazioni danno come risultato ancora un elemento dell’insieme, in modo che lo spazio acquisisca le proprietà di una struttura algebrica. Oltre al caso intuitivo dello spazio euclideo ℝn da cui la nozione di spazio trae origine, e quello ℂn i cui vettori sono descritti da elementi complessi, ricadono in questo caso anche lo spazio dei segnali con periodo T, quello dei segnali di energia, e quello dei segnali di potenza.
Scegliendo un
qualunque sottoinsieme
B ⊆ A di
n vettori
ui linearmente indipendenti, la combinazione lineare
dei vettori
ui con coefficienti
xi ∈ K esprime un qualunque elemento
x ϵ A purché n sia pari alla
dimensione dello spazio, ed in tal caso l’insieme
B dei vettori
ui è indicato come sua
base di rappresentazione.
Individua uno spazio vettoriale per il quale sia definita la norma (o lunghezza) ∥x∥ dei suoi elementi. Come si può verificare dalle proprietà che la definiscono
- 0 ≤ ∥x∥ < ∞ con ∥x∥ = 0 se e solo se x = 0
- ∥λx∥ = λ∥x∥ omogeneità con λ ϵ K
- ∥x + y∥ ≤ ∥x∥ + ∥y∥ disuguaglianza triangolare
la norma corrisponde alla definizione di distanza
d(x, y) data al §
2.4.1, semplicemente ponendo
d(x, y) ≐ ∥x − y∥. In tal modo lo spazio normato oltre che algebrico (perché lineare) diviene anche
metrico, con una metrica che è
indotta dalla norma; uno spazio normato che è anche completo è detto
spazio di Banach.
Per uno spazio vettoriale con un numero finito
n di dimensioni ed
isomorfo ad
ℝn si può definire norma
∥x∥p di ordine
p (con
p = 0, 1, ⋯∞) del vettore
x = x1 x2 ⋯ xn come la quantità
che per
p = 2 rappresenta una estensione del
teorema di Pitagora, mentre la distanza di ordine
p indotta tra coppie di vettori si scrive come
che nel caso
p = 2 fornisce la ben nota
distanza euclidea d2(x, y) = √∑ni = 1(xi − yi)2.
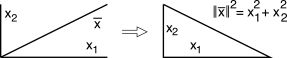
Esempio Il teorema di Pitagora stabilisce che (∥x∥)2 = x21 + x22, ossia che il quadrato costruito sull’ipotenusa è pari alla somma dei quadrati costruiti sui cateti, come in figura.
La geometria euclidea calcola la distanza tra due punti attraverso la costruzione grafica dei vettori le cui componenti sono le coordinate dei punti come in figura, e dunque z = x − y ha componenti z1 = x1 − y1 e z2 = x2 − y2.
2.4.3 Spazio prodotto interno e spazio di Hilbert
Torniamo ora indietro e ripartiamo da un generico spazio lineare definito su di un campo K reale o complesso, per il quale non è definita alcuna norma, mentre invece è definito un operatore detto prodotto scalare o prodotto interno, indicato come ⟨x, y⟩, e che associa uno scalare λ ∈ K a coppie di generici vettori x ed y in modo che
- ⟨x, y⟩ = ⟨y, x⟩* proprietà Hermitiana, ovvero commutativa se K = ℝ
- ⟨ax + by, z⟩ = a⟨x, z⟩ + b⟨y, z⟩ proprietà lineare e distributiva
- ⟨x, x⟩ ≥ 0 reale, con ⟨x, x⟩ = 0 se e solo se x = 0
da cui si ottiene che nel caso complesso deve risultare anche
⟨x, ay⟩ = a*⟨x, y⟩ detta proprietà
antilineare. Osserviamo quindi che la relazione
⟨x, x⟩ ≥ 0 può essere efficacemente utilizzata come
norma di
x, semplicemente ponendo
senza dover ricorrere a
definizioni come per la
(10.17). L’esistenza del prodotto interno pertanto
induce una norma (e dunque una
distanza) rendendo
metrico lo spazio lineare, che viene detto di
Hilbert qualora sia anche
completo; inoltre, il prodotto interno aggiunge allo spazio anche la nozione di
angolo θ tra vettori, come discutiamo ora.
Diseguaglianza di Schwartz
Esprime la relazione
ovvero
|⟨x, y⟩| ≤ ∥x∥ ⋅ ∥y∥, e quindi afferma che il prodotto interno tra vettori non è mai maggiore del prodotto delle rispettive lunghezze, eguagliandolo solo se i vettori sono proporzionali, ossia
x = αy , o in termini geometrici,
paralleli.
Dopo aver notato che dalla
(10.20) si ottiene
0 ≤ |⟨x, y⟩|∥x∥ ⋅ ∥y∥ ≤ 1, indichiamo i due estremi
0 e
1 come condizioni di
ortogonalità e
parallelismo, e dato che esiste un solo angolo
θ tale che
cosθ = |⟨x, y⟩|∥x∥ ⋅ ∥y∥ , identifichiamo
θ come l’angolo tra
x e
y, in modo che la
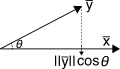
(10.20) possa essere letta nel consueto modo della fisica e della geometria, ovvero
dove
∥y∥ ⋅ cosθ rappresenta la proiezione di
∥y∥ verso la direzione di
x. A parole, l’eq.
(10.21) si legge come
il prodotto scalare è pari al prodotto dei moduli per il coseno dell’angolo compreso tra i vettori, e grazie a questo nuovo risultato, possiamo affermare che
Due vettori si dicono ortogonali se il loro prodotto scalare è nullo, ossia ⟨x, y⟩ = 0.
Procediamo con l’individuare una modalità di calcolo per il prodotto scalare, restringendo per ora l’analisi al caso di spazi a dimensione n finita e isomorfi (in quanto con base ortogonale) ad uno spazio euclideo ℝn, ovvero ℂn nel caso più generale di vettori a componenti complesse.
Prodotto scalare tra vettori espressi su di una medesima base ortogonale
Come espresso dalla
(10.16) i vettori
x di uno spazio lineare
n − dimensionale
A, tanto più se di Hilbert, possono essere espressi come una combinazione lineare
x = n⎲⎳i = 1xiui
di vettori
ui ϵ B linearmente indipendenti, ovvero
B è la base di rappresentazione di
A mediante coefficienti
{xi}. Se ora aggiungiamo che tra gli elementi di
B debba sussistere la condizione di ortogonalità a coppie, ovvero
⟨ui, uj⟩ = 0 per tutti gli
i ≠ j, l’intera base è detta
ortogonale, ed i coefficienti
xi si determinano eseguendo il prodotto scalare tra
x ed ognuno di essi
Possiamo a questo punto valutare il
prodotto scalare tra coppie di vettori
x = ∑ni = 1xiui e
y = ∑ni = 1yiui con coefficienti
{xi} e
{yi} ottenuti mediante la
(10.22), nei termini del prodotto scalare tra i vettori dei coefficienti, ovvero:
Calcolo della norma su di una base ortonormale
Se i vettori
ui oltre ad essere ortogonali hanno tutti norma pari ad uno ovvero
∥ui∥2 = ⟨ui, ui⟩ = 1 essi vengono detti
unitari, la base è detta
ortonormale, e dalla
(10.23) si ottiene per il prodotto scalare tra
x e
y
mentre la norma
quadratica di un generico vettore
x si ottiene come
che corrisponde al quadrato della
(10.17) per
p = 2. Quindi, quando la base
B di rappresentazione è ortonormale, ed il prodotto interno è definito dalla
(10.24), la norma indotta
(10.25) assume la stessa forma della
(10.17) corrispondente all’ordine
p = 2, accomunando il comportamento degli spazi di Hilbert a quello noto per la geometria euclidea, in cui la base è appunto ortonormale.
Una forma più generale per indicare sia l’ortogonalità che l’unitarietà utilizza la notazione
⟨ui, uj⟩ = δi, j, in cui
δi, j è detto
delta di Kronecker che vale 1 se
i = j e zero in caso contrario. La sua versione continua è il
delta di Dirac, introdotto al §
3.4.
Notiamo infine come il prodotto scalare
⟨x, ui⟩ tra
x ed un vettore della base ortonormale sia una
proiezione ortogonale, nel senso che potendo scrivere
⟨x, ui⟩ = |x| ⋅ |ui| ⋅ cosθ (eq.
(10.21)) ed essendo
ui a lunghezza unitaria, si ottiene la lunghezza
dell’ombra del primo nella direzione del secondo.
Distanza indotta dal prodotto scalare
Si esprime come la
norma del vettore differenza ovvero applicando la
(10.25)
d(x, y) = √∥x − y∥2 = √⟨x − y, x − y⟩ = √∑ni = 1|xi − yi|2
che a sua volta corrisponde a quella di ordine
p = 2 che abbiamo definito per gli spazi euclidei (eq.
(10.18)); si ricordi che nel caso di vettori complessi risulta
|xi − yi|2 = (xi − yi)(xi − yi)* = (ℜ{xi − yi})2 + (ℑ{xi − yi})2.
Esercizio Dati due vettori complessi
x = 1 + j2, 0 e
y = 3 + j4, − j2 calcolare la norma di entrambi, e la loro distanza. Si ha
∥x∥ = √⟨x, x⟩ = √(12 + 22) + 02 = √5 e
∥y∥ = √⟨y, y⟩ = √(32 + 42) + 22 = √29; mentre
z = x − y =
1 + j2 − 3 − j4,
0 + j2 =
− 2 − j2, j2
e dunque
d(x, y) = √(22 + 22) + 22 = √12.
2.4.4 Spazi a dimensionalità infinita
I risultati a cui siamo pervenuti, e che sono stati dimostrati per spazi con un numero n finito di dimensioni, mantengono validità anche qualora detto numero divenga infinito, come per gli spazi dei segnali periodici o di energia.
Un esempio di spazio con infinite (ma numerabili) dimensioni è quello indicato come lp e descritto da un vettore le cui componenti sono elementi di una successione x = {xi} con i = 1, 2, ⋯, ∞, e per le quali la norma ∥x∥p = p√∑∞i = 1|xi|p converge ad un numero finito. La successione Xn dei coefficienti di una serie di Fourier rispecchia tale proprietà per p = 2, e la corrispondente norma quadratica (∥x∥2)2 = ∑∞i = 1|X2n| esprime la potenza di x nei termini del teorema di Parseval.
Un altro spazio ad infinite dimensioni (stavolta non numerabili) è quello Lp delle funzioni x = x(t) la cui p − esima potenza è sommabile; la norma di ordine p in questo caso viene definita come ∥x(t)∥p = ( ∫xp(t)dt)1⁄p e per p = 2 ritroviamo la classe dei segnali di energia, alla cui energia corrisponde la norma quadratica Ex = (∥x(t)∥2)2 = ∫x2(t)dt, mentre la distanza d2(x(t), y(t)) tra segnali è la radice dell’errore quadratico ∫|x(t) − y(t)|2dt.
Anche se non ci addentreremo nei dettagli analitici soggiacenti,, il tipo di equivalenze appena menzionate sono una conseguenza dell’adattare la definizione di prodotto scalare
(10.24) ai casi a dimensionalità infinita, rendendo possibile associare alle relazioni ottenibili una interpretazione geometrica unificante.
2.4.4.1 Spazio dei segnali periodici
E’ quello descritto dall’insieme dei segnali periodici di periodo
T, dato che può essere dotato di un operatore di prodotto interno tra segnali
x(t) ed
y(t) nella forma
che quando calcolato per
y(t) = x(t) permette di equiparare la
norma quadratica di
x(t) alla relativa
potenza
∥x(t)∥2 = 1T T⁄2⌠⌡ − T⁄2|x(t)|2dt
e dunque la sua norma corrisponde al relativo
valore efficace (pag.
1). Osserviamo che
- la base ortonormale di rappresentazione dei segnali periodici è costituita dai segnali un = e j2πnFt con periodo T = 1F, in quanto per essi si ha 1T ∫T⁄2 − T⁄2 e j2π(n − m)Ftdt = δn, m come ottenuto nella (10.15). Si riconosce allora che la relazione eq. (10.6) rappresenta il prodotto scalare tra il segnale ed i vettori della base (10.22), dato che dalla (10.26) si ottiene ⟨x, un⟩ = 1T ∫T⁄2 − T⁄2x(t)e −j2πnFtdt = Xn;
- l’espressione della serie di Fourier x(t) = ∑∞n = −∞Xn e j2πnFt (eq. (10.7)) costituisce la rappresentazione del segnale nei termini delle sue componenti ortogonali su base ortonormale, come espresso dalla (10.16);
- il risultato fornito dal teorema di Parseval 1T ∫T⁄2 − T⁄2|x(t)|2dt = ∑∞n = −∞|Xn|2 (eq. (10.13)) non è altro che la (10.25), ovvero il calcolo della norma quadratica come somma dei quadrati delle componenti Xn di x(t) rispetto ai vettori e j2πnFt della base.
La differenza rispetto alla trattazione generale è che ora per descrivere lo spazio occorrono infiniti (ma numerabili) vettori della base; in tal senso, lo spazio (dei segnali con periodo T) è detto separabile, che nel contesto della teoria dei segnali significa che è costituito dalle sole frequenze armoniche della fondamentale.
Una seconda conseguenza dell’ortogonalità della base costituita dagli e j2πnFt è che qualora dalla serie venga omesso qualche termine (ovvero qualche indice n) ottenendo un diverso segnale x̂(t) = ∑incompletaXn e j2πnFt, il corrispondente errore xe(t) = x(t) − x̂(t), periodico anch’esso, giace su di un sottospazio ortogonale a quello esplorato dai vettori presenti nella serie, e (si dimostra che) ha la minima norma, e dunque potenza, possibile.
2.4.4.2 Spazio dei segnali di energia e di potenza
Definizione del prodotto interno
Anche in questi due casi è possibile definire un operatore prodotto interno, che per segnali di energia prende la forma
a cui corrisponde una
norma quadratica ∥x(t)∥2 = ⟨x(t), x(t)⟩ pari
all’energia del segnale
Ex = ∥x(t)∥2 = ∫T⁄2 − T⁄2|x(t)|2dt. Per segnali
di potenza invece il prodotto scalare si scrive come
a cui corrisponde una
norma quadratica che è pari
alla potenza del segnale
Px = ∥x(t)∥2 = limT → ∞1T ∫T⁄2 − T⁄2|x(t)|2dt.
Diseguaglianza di Schwartz
La
(10.20) può essere applicata sia ai
segnali di energia che a quelli
di potenza, in quanto le relative espressioni per il prodotto interno, quando sostituite nella
(10.20), permettono di scrivere (nel caso di energia)
ovvero che il quadrato del prodotto scalare (ovvero dell’
energia mutua, §
3.2) tra segnali è sempre inferiore al prodotto delle rispettive energie (o potenze), oppure uguale nel caso in cui un segnale sia proporzionale all’altro, ovvero
x(t) = αy(t). Per il caso dei segnali di potenza valgono le stesse parole, dopo aver sostituito la
(10.29) con
|| limT → ∞ 1T T⁄2⌠⌡ − T⁄2x(t)y*(t)dt||2 ≤ limT → ∞ 1T T⁄2⌠⌡ − T⁄2|x(t)|2dt ⋅ limT → ∞ 1T T⁄2⌠⌡ − T⁄2|y(t)|2dt
Questi concetti troveranno applicazione ad es. al §
3.2 relativamente all’
energia mutua, al §
7.1.4 nel definire la
correlazione tra segnali, al §
7.6 per l’analisi del
filtro adattato... Ma lanciamoci prima su di una ulteriore speculazione, di cui tralasciamo il rigore teorico: buona parte delle relazioni affrontate nella prima parte del testo
sono una forma di prodotto interno.
2.4.4.3 Spazio dei funzionali lineari definiti da un prodotto interno
Al §
1.6 si è definito un
sistema come una trasformazione
T [.] che produce segnali di uscita in funzione di segnali di ingresso ovvero
y(t) = T [x(t)]. Dal punto di vista dell’analisi
T [.] viene pensato come un operatore o
funzionale lineare (eq.
(1.3)) che
mappa i vettori
x dello spazio
X dei segnali di ingresso, in elementi
y di uno spazio
Y di segnali di uscita, eventualmente
monodimensionale.
Qualora
X sia uno spazio di Hilbert (ossia completo e dotato di prodotto interno), allora qualunque funzionale
Tφ[x] può essere espresso nella forma di un prodotto interno
tra il vettore
x ∈ X ed un altro vettore-segnale
φ che caratterizza la trasformazione. La funzione
φ è talvolta chiamata la
funzione-kernel, il
kernel integrale o il
nucleo di una trasformazione integrale, ma non in questo testo.
Se anche
φ ∈ X l’operatore
(10.30) può fornire alcuni risultati ben noti discussi altrove nel testo. Ad esempio se
φ = x le espressioni per il prodotto scalare dei segnali
(10.27) e
(10.28) consentono di ottenere l’energia o la potenza di segnale
x; in modo simile , se
φ ≠ x si ottengono le formule per
l’energia mutua (10.35) e
l’intercorrelazione (10.155). Nell’intercorrelazione in particolare il vettore
φ che caratterizza il funzionale dipende da
due variabili
φ = φ(t, θ), in modo che il risultato del prodotto interno
⟨x(t), φ(t, θ)⟩ = ∞⌠⌡ −∞x(t)φ*(t, θ)dt = y(θ)
dipenda dalla nuova variabile
θ. Dato che stiamo portando esempi che rimandano ad argomenti trattati nei capitoli successivi, può essere opportuno tornare qui dopo aver svolto una prima fase di studio, almeno fino al cap.
7.
Prendiamo ora ad esempio il caso della
trasformata di Fourier (10.31), che calcola
X(f) = ∞⌠⌡ −∞x(t)e −j2πftdt = ⟨x(t), e j2πft⟩
e che costituisce dunque la proiezione di
x(t) nei confronti del segnale
e j2πft, che a sua volta rappresenta il vettore
φ(t, f). A ben guardare, gli esponenziali complessi costituiscono una base
ortonormale per i segnali di energia (§
3.8.5), condizione che in questo spazio è definita come
⟨φ(t, f), φ(t, λ)⟩ = δ(f − λ)
in cui
δ è un
impulso di Dirac. Da questa proprietà degli
e j2πft discende sia l’esistenza della
antitrasformata nella forma
(10.32), sia la proprietà di
unitarietà della trasformazione, ovvero di non alterare la lunghezza dei vettori nel passare dagli elementi dello spazio di segnale
X (funzione di
t) a quelli dello spazio immagine
Y (funzione di
f), e che dà luogo al teorema di Parseval.
In alcuni casi il vettore
φ che caratterizza il funzionale
(10.30) dipende da una
differenza di variabili, ovvero
φ(t, τ) = φ(t − τ)
come nell’operazione di
setacciamento (10.44), di
trasformata di Hilbert (14.26), o di
convoluzione (10.48): in quest’ultimo caso
φ(t, τ) = h(t − τ) è direttamente legato alla
risposta impulsiva h(t) che caratterizza completamente il
sistema.
Se aver verificato che una convoluzione e dunque
un filtro corrisponde ad un prodotto scalare e quindi ad un funzionale ovvero
un sistema non ci è bastato, allarghiamo il discorso aggiungendo il fatto che l’insieme dei funzionali
Tφ che operano su di un medesimo spazio di Hilbert
X di ingresso costituisce
esso stesso uno spazio di Hilbert, detto
spazio duale X*, in cui la norma è definita come
∥Tφ∥ = ∥φ∥ = √⟨φ, φ⟩
e se
∥φ∥ < ∞ il funzionale è
continuo. Se inoltre
X possiede una base
ortonormale {ui(t)} mediante la quale rappresentare i suoi vettori come
x(t) = ∑ni = 1xiui(t) in cui
xi = ⟨x(t), ui(t)⟩, allora i funzionali di
X* possono
a loro volta essere rappresentati come una combinazione lineare di vettori-segnali.
Un modo diretto di procedere esprime il
segnale di uscita y(θ) = Tφt, θ[x(t)] come
y(θ) = n⎲⎳i = 1xiTφt, θ[ui(t)] = n⎲⎳i = 1xivi(θ)
in cui
vi(θ) è il risultato del funzionale
Tφ applicato ai vettori della base
ui(t) di
X, che dunque opera sommando i suoi
vettori di risposta vi(θ) (che appartengono a
Y) con pesi pari alle componenti
xi di
x(t) proiettate sugli
ui(t).
Esempio L’integrale di convoluzione
y(t) = ∫∞−∞x(τ) h(t − τ) dτ esprime l’uscita
y(t) come combinazione lineare delle
h(t − τ) effetto degli impulsi
δ(t), che costituiscono una base ortonormale per
x(t) nei termini espressi dalla proprietà di setacciamento
x(t) = ∫∞−∞x(τ)δ(t − τ)dτ, vedi §
3.4.
Non è però detto che
{vi(θ)} formi una base di vettori linearmente indipendenti per lo spazio di uscita
Y; poniamo allora di conoscere una base ortonormale
{ũi(θ)} per lo spazio
Y (): in tal caso esiste un insieme di
n vettori
{zi(t) ∈ X} che dipende sia da
{ũi(θ)} che da
{ui(t)} e dalla sua trasformata
{vi(θ)}, e che individua altrettanti funzionali
Tzi[x(t)] = ⟨x(t), zi(t)⟩ in modo da poter scrivere
y(θ) = n⎲⎳i = 1⟨x(t), zi(t)⟩ũi(θ) = n⎲⎳i = 1 Tzi[x(t)]ũi(θ)
decomponendo quindi
Tφ in
n funzionali dipendenti dalla scelta delle basi.