5.1 Filtri analogici
Affrontiamo questa classe di filtri senza addentrarci in molti dettagli (svolti in altri corsi), limitandoci a descrivere la metodica di studio. Come anticipato, i filtri analogici operano esclusivamente su segnali tempo-continui, e sono realizzati mediante una varietà di tecniche. Il tipo più comune è quello basato su circuiti
rlc a costanti concentrate, detto
filtro passivo in quanto non richiede alimentazione, essendo costituito da condensatori, induttori e resistori. La difficoltà di ottenere elementi di elevata induttanza ma di piccole dimensioni necessari alle frequenze più basse ha portato a realizzarne la funzione per mezzo di amplificatori operazionali dando luogo (fino a circa 1 MHz) ai
filtri attivi, mentre a frequenze più elevate oltre agli
rlc si possono realizzare filtri a
cristallo,
elettromeccanici, a
guida d’onda, a
microstrisce.
In tutti i casi è possibile svolgere
l’analisi del circuito e pervenire all’espressione di una
funzione di trasferimento razionale del tipo
(in cui
M < N), definita su di un piano complesso
s = σ + j2πf, e ponendo
s = j2πf si ottiene la risposta in frequenza
H(f) = H(s = j2πf). Il grado
N del denominatore di
(10.90) (uguale al numero delle sue radici o
poli) definisce
l’ordine del filtro, ed è legato sia alla sua complessità realizzativa, sia alla rapidità di variazione della
H(f).
Tipo di polinomio e di filtro
Lo spazio di progetto del filtro viene delimitato vincolando i polinomi
N(s) e
D(s) ad appartenere ad una delle
famiglie dette di
Bessel, di
Butterworth, di
Chebyschev o di
Cauer (o filtri ellittici) , che essenzialmente differiscono tra loro per la posizione delle radici del polinomio nel piano
s; la figura
5.2 mostra il modulo della risposta in frequenza
H(f) di un filtro
passa-basso ottenibile nei diversi casi per uno stesso ordine
N = 5.
Per ogni famiglia esistono
tabelle di coefficienti
precalcolati per diversi valori di
N e che danno luogo ad un filtro passo-basso
prototipo ovvero con frequenza di taglio (vedi sotto)
unitaria, dai quali si ottengono (mediante operazioni di cambio di variabile) i nuovi coefficienti per frequenze di taglio qualsiasi e per filtri con altro tipo di banda passante, ossia passa-alto, passa-banda e arresta-banda (o
notch); gli ultimi due casi sono inoltre realizzabili anche rispettivamente come cascata o parallelo di un passa-alto più un passa-basso, con frequenze di taglio opportune.
Specifiche di progetto, ordine del filtro e scelta del polinomio
L’ordine del filtro viene individuato come quello per il quale il modulo della risposta in frequenza
|H(f)| (o meglio, il suo quadrato) associata al polinomio prescelto rientra all’interno della
maschera definita da uno
schema di tolleranza del tipo mostrato nella figura a lato. La specifica è tanto più stringente quanto più
|H(f)| varia rapidamente, cosa possibile solo aumentando l’ordine
N. Ma non tutti i polinomi si comportano allo stesso modo, anzi, come evidente guardando la fig.
5.2 da sin. a destra, a parità di ordine alcuni permettono transizioni assai più rapide rispetto ad altri. D’altra parte per molte applicazioni è anche necessario garantire una buona
linearità di fase (pag.
1, §
8.2.2) da parte del filtro, ma in linea generale questa seconda esigenza è incompatibile con una elevata
selettività (vedi sotto) del filtro. In particolare i filtri di
Bessel sono gli unici ad esibire una fase lineare, ma decadono lentamente con la frequenza; per gli altri tipi di fig.
5.2 la linearità di fase peggiora all’aumentare della selettività, specie in prossimità della frequenza di taglio. Quindi in definitiva la scelta del polinomio viene effettuata in base alla specifica sulla fase, e l’ordine N del filtro determinato in base alla maschera di attenuazione.
Frequenza di taglio, selettività e fattore di qualità
Sono parametri che descrivono un filtro in modo grossolano ma indicativo. La frequenza
di taglio fT è quella per la quale
e dunque individua una sorta di
frontiera tra la banda passante e quella soppressa. La
selettività di un passa basso è misurata dal rapporto
k = fpfs ≤ 1
(l’inverso per un passa-alto) ed è tanto più grande quanto meno estesa è la regione di transizione. Nel caso di un passa-banda centrato in
f0 il filtro può inoltre essere caratterizzato nei termini del suo
fattore di qualità
Q = f0B
in cui
B = fT2 − fT1 è la banda compresa tra le due frequenze di taglio inferiore e superiore;
Q rappresenta pertanto quanto il filtro
è stretto attorno alla sua risonanza, ed il suo inverso
B⁄f0 è chiamato
banda frazionaria.
Mentre i filtri di Bessel, Butterworth e Chebyshev-I sono filtri a soli poli, quelli di Chebyshev-II ed Ellittici possiedono anche zeri. Ma in entrambi i casi una volta noti i coefficienti, la
(10.90) si riscrive in forma fattorizzata
H(s) = ∏N⁄2j = 1Hj(s) con ogni termine
Hj(s) che presenta una coppia di poli coniugati e che corrisponde ad un circuito risonante del secondo ordine o
cella circuitale, producendo il massimo per
|Hi(j2πf)|2 alla frequenza di risonanza
fi0. Ponendo le diverse celle
in cascata si ottiene così la
H(f) che soddisfa i requisiti stabiliti dallo schema di tolleranza.
Nonostante quanto discusso appaia direttamente applicabile al solo caso di segnale analogico, al §
5.3 mostreremo come i risultati ottenuti siano applicabili anche al caso di segnali numerici, dato che esistono tecniche (basate su cambi di variabile che
mappano il semipiano sinistro della variabile
s all’interno del
cerchio unitario del piano
z) che permettono di passare da una
H(s) ad una
H(z), e di lì ad una realizzazione del filtro in forma
numerica.
5.1.1 Filtro analogico ad un polo
A titolo di esempio esemplificativo di quanto fin qui illustrato, occupiamoci del più semplice tipo di filtro analogico, costituito dal partitore
rc rappresentato alla figura seguente, e che realizza una funzione di passa-basso
.
Considerando la tensione
vi(t) come il segnale di ingresso al filtro, mostriamo
che la corrispondente uscita
vu(t) può essere espressa come convoluzione tra
vi(t) ed una risposta impulsiva
L’analisi del circuito porta infatti ad una espressione per la risposta in frequenza pari a
di cui la
(10.92) è l’antitrasformata . Estendendo questo risultato al dominio di Laplace si ottiene
H(s) = 11 + sRC
Pertanto,
H(s) presenta un polo in
s = − 1RC, e dunque risulta
H(s)|s = − 1RC = ∞.
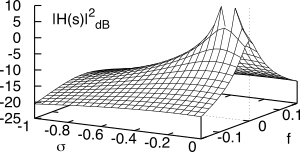
A lato è raffigurato l’andamento di
10 log10|H(s)|2 calcolato per un valore
RC = 8. Come evidente,
|H(s)|2 può essere pensata come una sorta di
cono vulcanico attorno al polo sito in
1⁄RC = 0.125 e la cui sezione, ottenuta dall’intersezione con un piano verticale passante per l’asse
j2πf, individua la risposta in frequenza
H(f) = H(s = j2πf). Come si vede dalla figura,
H(f) risulta di tipo passa basso, con fianchi tanto più ripidi quanto più il polo è vicino all’origine.
Nel caso del filtro RC risulta che
|HMax| = H(0) = 1, ed esprimendo il modulo della
(10.93) nella forma
|H(f)| = 1√1 + (2πfRC)2 = 1√1 + ⎛⎝ffT⎞⎠2
si pone in evidenza che
fT = 12πRC rappresenta proprio la frequenza di taglio: infatti,
|H(fT)| = 1√1 + 1 = 1√2. Cogliamo l’occasione per notare che risultando (eq.-
(10.91))
|H(fT)|2 = 12 H2Max si ottiene che
|H(fT)|2|dB = H2Max(dB) − 3; per questo la frequenza di taglio è indicata anche come
frequenza a 3 dB.