24.3 Rete plesiocrona
Questo termine si riferisce alla modalità di funzionamento quasi-sincrona adottata dalle centrali telefoniche, almeno finché la rete di trasporto non è divenuta capace di realizzare una modalità di multiplazione sincrona (§
24.4). In entrambi i casi, i segnali vocali sono trasportati in forma numerica, multiplandone i campioni a divisione di tempo in modo deterministico, in accordo ad una organizzazione di trama realizzata presso la centrale di accesso, come descritto di seguito.
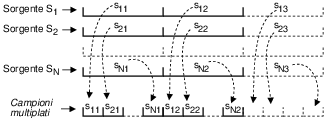
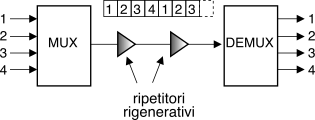
Nella figura seguente sono rappresentati tre segnali
tributari, campionati a turno alla stessa frequenza di 8 KHz, quantizzati ad 8 bit per campione con quantizzazione logaritmica (vedi §
4.3.2), e trasmessi (8 bit alla volta) a turno su di un unico collegamento, producendo un segnale binario che prende il nome di
pcm (
Pulse Code Modulation). In figura è evidenziato inoltre un blocco di sincronizzazione (§
24.3.3) necessario a ricostruire la corretta sequenza ricevuta, in modo da redistribuire correttamente i campioni ai filtri di restituzione.
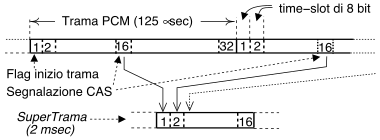
La struttura temporale ripetitiva che ospita i campioni dei singoli tributari prende il nome di trama (frame), ed è composta da 32 intervalli temporali detti time-slot. Trenta di questi ospitano a turno i bit di un campione proveniente da un numero massimo di 30 tributari, mentre i rimanenti due intervalli convogliano le informazioni di segnalazione, che indicano lo stato dei singoli collegamenti (il 16o intervallo) e forniscono il sincronismo relativo all’inizio della trama stessa (il primo).
Le trame si susseguono ad una velocità pari alla frequenza di campionamento di ciascun tributario e quindi abbiamo 8000
tramesec; ognuno dei 32
intervallitrama ospita 1
campioneintervallo, a sua volta formato da 8
bitcampione, ottenendo così una velocità binaria complessiva di
1*8 = 2048000 bitsec; per questo motivo ci si riferisce all’insieme come alla
trama PCM a 2 Mbit. D’altra parte, essendo pari al periodo di campionamento
la durata della trama è di 1/8000 = 125
μsec.
Il primo time-slot della trama contiene una configurazione di bit sempre uguale, chiamata
flag (
bandiera, vedi §
22.5.2.1), che ha lo scopo di indicare ai circuiti di sincronismo l’inizio della trama stessa. I dati di segnalazione contenuti nel 16
o intervallo devono essere
diluiti su più trame, per poter rappresentare tutti i 30 tributari. Si è stabilito che occorra prelevare il 16
o intervallo di 16 trame successive, per ricostruire una struttura detta
supertrama (di 16*8 = 128 bit) che rappresenta le informazioni di tutti i tributari (disponendo così di 4 bit/tributario/supertrama), e che si ripete ogni 16*125 = 2000
μsec = 2 msec.
In effetti nel 16o time-slot della trama sono presenti a turno, oltre ai bit di segnalazione relativi allo stato dei tributari, anche bit necessari alla sincronizzazione della supertrama (ossia un flag), mentre le informazioni di segnalazione sono ripetute più volte nella stessa supertrama, per proteggersi da eventuali errori di ricezione, che danneggiando l’informazione sullo stato dei canali, potrebbero causare la “caduta della linea”.
24.3.2 Messaggi di segnalazione
Come illustrato al §
24.9.1 la rete di accesso è sede di uno scambio di informazioni tra terminale e centrale locale, detta
segnalazione di utente, che ha lo scopo di indicare la disponibilità della rete, il numero chiamato, l’attivazione della suoneria, ed i messaggi a ritroso di libero/occupato. L’inoltro di queste informazioni da parte della centrale di accesso verso la rete (e viceversa) può essere gestito secondo due diversi approcci.
Segnalazione associata al canale
In questo caso la centrale di accesso inserisce le informazioni di segnalazione relative ad un tributario all’interno della
supertrama di segnalazione, ottenuta collezionando i valori presenti nel 16
o time-slot. Questa modalità viene indicata come
cas (
Channel Associated Signaling), ed ha origine dalla conversione dei precedenti collegamenti analogici, in cui la segnalazione relativa ad ogni terminale viaggiava in modo indissolubilmente associato al segnale vocale, condividendo con questo il mezzo trasmissivo a commutazione di circuito. Con la numerizzazione, si è inizialmente scelto di mantenere la segnalazione
associata al segnale vocale, con la contropartita che quando, nell’attraversare una centrale di transito, una comunicazione è commutata su di una diversa linea di uscita, deve essere commutata anche la segnalazione associata.
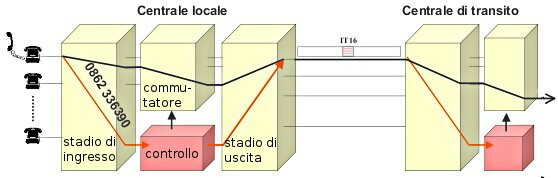
La figura
24.5 mostra come la numerazione venga recepita da un organo di
controllo centrale, che provvede a impostare il dispositivo di commutazione (§
24.8), in modo che la comunicazione sia instradata verso la linea di uscita in direzione della destinazione. Quindi, l’informazione di segnalazione viene ri-associata nell’intervallo 16.
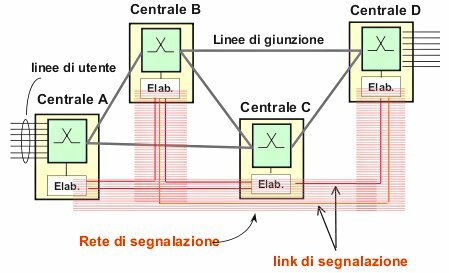
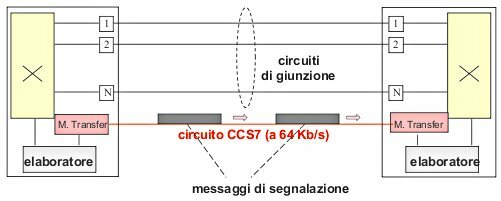
Segnalazione a canale comune
Il primo passo evolutivo è stato quello di provvedere ad un
canale comune di segnalazione direttamente collegato agli organi di controllo (vedi fig.
24.6), su cui poter convogliare la segnalazione relativa
a tutte le comunicazioni in transito tra le due centrali.
I messaggi di segnalazione, per loro natura, devono essere trasmessi solo quando si verificano degli eventi significativi, e per questo motivo sono ora inviati mediante dei pacchetti dati. Il passo successivo è quindi stato quello di realizzare una intera rete a commutazione di pacchetto, parallela a quella di transito su cui viaggiano (in modalità a circuito) le conversazioni vocali.
In tal modo gli organi di controllo delle centrali sono in comunicazione diretta tra loro, secondo la modalità cosiddetta
ccs (
common channel signaling), mediante una rete a pacchetto dedicata alla segnalazione, sulla quale viaggiano i messaggi definiti da un apposito
sistema di segnalazione (vedi §
24.9.3). Questo permette di centralizzare il controllo e la configurazione di tutte le centrali coinvolte nell’instradamento di una stessa comunicazione, rendendo così possibile la disponibilità di servizi come il trasferimento di chiamata, la conversazione a tre, l’avviso di chiamata....
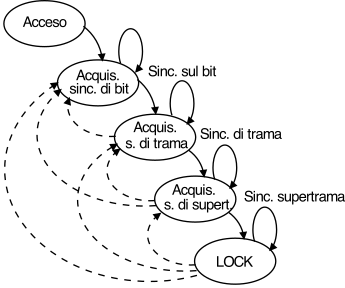
24.3.3 Sincronizzazione di centrale
Alla figura seguente sono mostrati i diversi stati
attraverso cui deve evolvere il dispositivo di sincronizzazione che opera sui flussi
pcm cas, prima di entrare nello stato di
lock (
aggancio) ed iniziare a poter leggere e smistare i contenuti dei diversi time-slot. Occorre infatti acquisire innanzitutto il sincronismo sul bit, sfruttando le caratteristiche del codice di linea utilizzato; quindi si sfrutta la conoscenza della configurazione scelta per il flag di inizio trama, per individuare da dove iniziare a conteggiare gli intervalli temporali. Infine, viene individuato l’inizio della supertrama, grazie ad un’ulteriore configurazione prefissata, posta all’inizio della stessa. Per ogni stato esiste poi la possibilità (fortunatamente remota) di perdere il sincronismo ed
indietreggiare (linee tratteggiate) nel diagramma di stato, perdendo le comunicazioni in corso.
24.3.4 Multiplazione asincrona e PDH
L’argomento di questo paragrafo non va confuso con la
trasmissione asincrona (quella
start-stop mostrata al §
15.7.1), che descrive una modalità di
inviare informazioni numeriche; qui invece si tratta di
multiplare, ossia come
mettere assieme più comunicazioni.
Man mano che i nodi vicini alla
periferia della rete di trasporto instradano il traffico verso quelli di livello gerarchico superiore, associati ad aree di influenza geografica più estesa (vedi §
24.5), i collegamenti di giunzione iniziano a trasportare un numero di tributari sempre più elevato, ottenuti
mettendo assieme tutte le conversazioni contemporaneamente dirette verso la stessa destinazione. Considerando allo stesso tempo la necessità di dover svolgere nelle centrali la funzione di
commutazione, è importante individuare metodi efficienti per
raggruppare assieme più tributari, anche a velocità diverse, rendendo allo stesso tempo relativamente agevole
inserire o
rimuovere i singoli tributari. Rimandiamo al §
24.4 l’analisi di come avvenga il processo di multiplazione nel caso in cui esista una perfetta sincronizzazione tra gli elementi della rete, e trattiamo nel seguito il caso della rete
plesiocrona.
Nella trama
pcm (§
24.3.1), tutti i 30 canali sono campionati congiuntamente, e più flussi a 2 Mbit possono a loro volta essere “messi assieme” in modalità
bit interleaved (prendendo un bit alla volta da ogni tributario) mediante appositi dispositivi
multiplatori (o
multiplexer, o
mux). Il collegamento tra nodi può inoltre prevedere dispositivi detti
ripetitori rigenerativi (uno o più di uno, vedi §
18.3.2) che oltre ad amplificare il segnale, lo “puliscono” dal rumore accumulato, decodificando i dati in ingresso per poi generare ex-novo il segnale numerico.
Il problema con questo modo di procedere è che i singoli tributari possono ragionevolmente avere origine da centrali differenti, ognuno con un proprio orologio indipendente, e quindi le loro velocità possono essere lievemente differenti l’una dall’altra, pur essendo molto simili. In questo caso si dice che la rete opera in modo plesiocrono, ossia quasi isocrono (ma non del tutto).
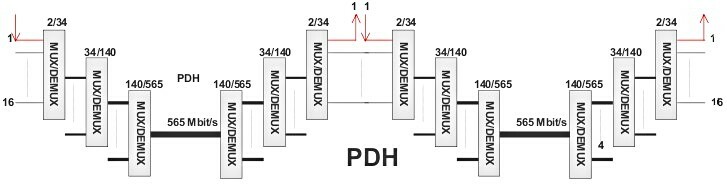
In tabella riportiamo la gerarchia
ccitt, nota come
Plesiochronous Digital Hierarcy (
pdh), secondo la quale ad esempio 4 flussi da 2 Mbps (detti
e1) sono multiplati in uno da 8 Mb/sec (
e2): notiamo che sebbene siano teoricamente sufficienti 8192 Mb/sec, in realtà il multiplexer ne produce di più (8448). La quantità in eccesso ha lo scopo di permettere la multiplazione di segnali non necessariamente sincroni, mediante la tecnica del
bit stuffing.
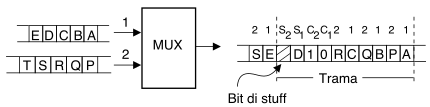
Consideriamo l’esempio in figura,
con 2 tributari i cui bit vengono inseriti alternativamente in una trama da 4 bit/canale; il secondo risulta lievemente più lento. I primi 3 + 3 bit (
abc e
pqr) vengono comunque alternativamente trasmessi, mentre il 4
o bit di ciascun flusso può essere trasmesso o meno, a seconda se i tributari lo abbiano pronto. Per ottenere questo risultato i bit
C1 e
C2 (di controllo) valgono 0 oppure 1 a seconda se l’intervallo seguente (
S1 e
S2) contiene un dato valido oppure sia solo un
bit di stuff, cioè vuoto, in quanto il tributario corrispondente è più lento rispetto alla velocità nominale. Ecco perché le velocità delle gerarchie superiori sono
abbondanti: per ospitare i bit di controllo, necessari a gestire tributari non sincronizzati.
Il metodo illustrato permette in ricezione di effettuare il destuffing, e riottenere i flussi originari. Nella realtà le informazioni di controllo sono molto ridondate, perché se scambiassimo un bit di stuff per uno buono (o viceversa), distruggeremmo anche la struttura di trama del tributario che ha subito l’errore.
24.3.4.2 Add and Drop Multiplexer - ADM
La modalità
bit interleaved con cui è realizzata la gerarchia PDH è particolarmente problematica qualora di desideri estrarre e/o introdurre un singolo tributario da/in un segnale multiplato di ordine elevato, ovvero realizzare una funzione detta
Add and Drop.
In questo caso è infatti necessario eseguire un’operazione inversa a quella di multiplazione, ovvero (vedi fig.
24.10) demultiplare l’intero flusso, compresi tutti gli altri tributari, e successivamente ri-multiplare di nuovo il tutto.
Questa caratteristica limita notevolmente la flessibilità delle configurazioni di rete ottenibili con questa tecnologia, e per i tributari passanti comporta l’aggiunta di un ritardo temporale causato dalle operazioni di demultiplazione e ri-multiplazione. Nella pratica vengono usati solo flussi di tipo E1, E3 ed E4, che sono quelli più adatti per essere trasportati nella gerarchia sincrona SDH, multiplando direttamente sedici tributari a 2 Mbit/s all’interno di un unico flusso a 34 Mbit/s.
24.3.5 Sincronizzazione di rete
Se tutti i nodi della rete operassero alla stessa velocità, non sussisterebbero problemi nella multiplazione di più tributari. Nel caso in cui la sincronizzazione tra nodi sia completamente affidata ad un orologio di centrale di elevata precisione, si verifica il caso di funzionamento plesiocrono, che è quello prescritto per le centrali che interconnettono le reti di due diverse nazioni, o di due diversi operatori di telecomunicazioni. Ma questa non è l’unica soluzione.
Una alternativa è la sincronizzazione mutua tra centrali, in cui ognuna di queste emette i dati in uscita ad una frequenza pari alla media delle frequenze dei dati in ingresso. A parte fenomeni transitori durante i quali la rete è soggetta ad oscillazioni di velocità, relativi all’inserimento od alla disattivazione di centrali “topologicamente importanti”, il metodo funziona ragionevolmente bene. Una seconda soluzione è una sincronizzazione di rete di tipo gerarchico in cui le centrali ricevono informazioni di sincronismo da soggetti “più importanti”, come per configurazioni Master-Slave in cui il Master è una centrale ad elevata precisione, od un riferimento in comune come ad esempio un segnale proveniente da un satellite in orbita terrestre.
Si tratta di un accorgimento idoneo ad
assorbire le fluttuazioni della velocità di trasmissione, come ad esempio nel caso della sincronizzazione mutua. Mentre il
bit stuffing (§
24.3.4.1) è adottato nella multiplazione di più tributari in un livello gerarchico più elevato, l’
elastic store è usato per compensare le diverse velocità tra tributari di eguale livello gerarchico in ingresso ad un elemento di commutazione (§
24.8).
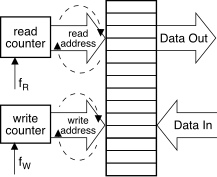
E’ realizzato mediante un banco di memoria (di dimensione pari ad una trama), riempito (ciclicamente) con le parole (word) del flusso binario in ingresso, alla velocità
fW di quest’ultimo, alla posizione individuata dal contatore
write che si incrementa appunto a velocità
fW, e che torna a puntare all’inizio della memoria una volta raggiunto l’indirizzo più elevato. Un secondo puntatore
read viene utilizzato per leggere la memoria, alla velocità
fR richiesta, e prelevare i dati da inviare in uscita: se
fR e
fW sono differenti,
read e
write prima o poi si sovrappongono, causando la perdita o la ripetizione di una intera trama, e nulla più.