Prec Sezione 16.2: Collegamenti in
cavo Su
Capitolo 16: Collegamenti e mezzi trasmissivi Sezione
16.4: Collegamenti in fibra ottica Segue
16.3 Collegamenti radio↓
La trasmissione via onda radio si differenzia da
quella via cavo o fibra ottica sotto diversi aspetti, tra cui la
condivisione di uno stesso mezzo tra più comunicazioni, e la possibilità
di comunicare in movimento. E’ resa possibile dalla conversione di un
segnale elettrico in
radiazione elettromagnetica [734] [734] Dato
che tale conversione avviene unicamente a seguito delle variazioni
del segnale, è esclusa la presenza di una componente continua, e per
questo (ma non solo) il segnale può unicamente essere di natura modulata.
ad opera dei dispositivi di antenna, che fungono da carico dal
lato trasmissione, e da generatore dal lato ricezione. La descrizione
 circuitale delle antenne viene poi semplificata dalla circostanza che
per il segnale modulato è praticamente sempre vera la condizione di
occupare una banda stretta attorno alla portante f0,
in modo da poterlo assimilare ad una singola sinusoide. In tal caso, le
condizioni di massimo trasferimento di potenza (§ 15.1.1.3↑) tra
amplificatore finale e antenna trasmittente (Zg
= Z*T)
e tra antenna ricevente e stadio di ingresso al ricevitore (ZR
= Z*i)
danno luogo, nella banda di segnale, ad una risposta in frequenza H(f)
che non dipende dalla frequenza (modulo e fase costanti), e questo
corrisponde (a parte una rotazione di fase) all’assenza di distorsione
lineare, vedi pag. 1↑.
Tutta la potenza disponibile fornita dall’amplificatore finale WdT
= (V2Teff)/(4Rg) viene ceduta all’antenna,
e da questa allo spazio. In effetti ZT
dipende dalla frequenza portante ed in parte dalla geometria dello
spazio circostante, mentre Zg
è in genere fissata a 50 Ω; perciò tra
stadio di uscita del trasmettitore Tx
e cavo di antenna può essere interposto un adattatore di impedenza [735] [735] Vedi ad es. https://en.wikipedia.org/wiki/Antenna_tuner.
circuitale delle antenne viene poi semplificata dalla circostanza che
per il segnale modulato è praticamente sempre vera la condizione di
occupare una banda stretta attorno alla portante f0,
in modo da poterlo assimilare ad una singola sinusoide. In tal caso, le
condizioni di massimo trasferimento di potenza (§ 15.1.1.3↑) tra
amplificatore finale e antenna trasmittente (Zg
= Z*T)
e tra antenna ricevente e stadio di ingresso al ricevitore (ZR
= Z*i)
danno luogo, nella banda di segnale, ad una risposta in frequenza H(f)
che non dipende dalla frequenza (modulo e fase costanti), e questo
corrisponde (a parte una rotazione di fase) all’assenza di distorsione
lineare, vedi pag. 1↑.
Tutta la potenza disponibile fornita dall’amplificatore finale WdT
= (V2Teff)/(4Rg) viene ceduta all’antenna,
e da questa allo spazio. In effetti ZT
dipende dalla frequenza portante ed in parte dalla geometria dello
spazio circostante, mentre Zg
è in genere fissata a 50 Ω; perciò tra
stadio di uscita del trasmettitore Tx
e cavo di antenna può essere interposto un adattatore di impedenza [735] [735] Vedi ad es. https://en.wikipedia.org/wiki/Antenna_tuner.
16.3.1 Trasduzione elettromagnetica
Antenna↓
isotropa

Sono antenne che hanno direzioni privilegiate
di emissione. Ad esempio, le antenne paraboliche dispongono di un illuminatore
o feed [736] [736] Dall’inglese
to feed = alimentare. posto in corrispondenza
del fuoco della parabola stessa, la cui superficie riflette le
onde elettromagnetiche in modo che si propaghino in forma pressoché
parallela [737] [737] Il
processo di focalizzazione parabolica, comunemente usato ad esempio
nei fanali degli autoveicoli, era ben noto ad Archimede
da Siracusa, che lo impiegò negli specchi ustori....

La potenza WdT
si distribuisce quindi non sfericamente, e la direzione di
propagazione massima esibisce un guadagno GT
rispetto all’antenna isotropa, mentre l’intensità di campo irradiato
spazialmente è descritta da un diagramma di radiazione. Il
valore di GT
dipende dal rapporto tra le dimensioni dell’antenna e quelle della
lunghezza d’onda λ secondo la
relazione
(16.111)
GT = 4π(A)/(λ2)
avendo indicato con A l’area
dell’antenna; il guadagno GT
viene spesso espresso in dBi,
ovvero dB riferiti all’antenna isotropa.
Può essere definita una larghezza del fascio
(beam width), che misura l’angolo θb entro cui la
potenza irradiata è superiore alla metà della massima potenza presente
nella direzione privilegiata [738] [738] Si
tratta di un concetto del tutto analogo alla “frequenza di taglio a
3 dB”, ma applicata ad un dominio spaziale con geometria radiale..
Ovviamente minore è θb,
e maggiore è GT.
Se una antenna identica a quella trasmittente
viene usata (dall’altro lato del collegamento) per ricevere, questa
mantiene lo stesso guadagno GR
= GT e lo stesso θb.
Si definisce allora la sua area efficace come il valore
(16.112)
Ae = GR(λ2)/(4π)
legato alla forma e dimensione dell’antenna, a meno di un fattore di
efficienza ρ ( [739] [739] Indicando
con Ar
l’area reale (fisica) dell’antenna, risulta Ae
= ρAr, con ρ
< 1. La diseguaglianza tiene conto delle perdite
dell’antenna, come ad esempio le irregolarità nella superficie della
parabola, o l’ombra prodotta dalle strutture di sostegno.
Ovviamente, anche l’antenna trasmittente presenta perdite, ed il
valore GT misurato
è inferiore a quello fornito dalla (16.111↑),
a meno di non usare appunto il valore di area efficace.).
Perciò una stessa antenna (Ae
fisso) aumenta il suo guadagno (e stringe il beam) all’aumentare
della frequenza, ovvero al diminuire di λ
= (c)/(f) ( [740] [740] La
costante c = 3⋅108
metri/secondo rappresenta la velocità della luce nel vuoto, ossia la
velocità di propagazione dell’onda elettromagnetica nello spazio.).
16.3.2 Bilancio di collegamento per spazio libero
Usando l’area efficace dell’antenna ricevente (16.112↑)
per intercettare parte della potenza irradiata (16.110↑),
si ottiene
WR = WdTGT(Ae)/(4πd2) = WdTGTGR⎛⎝(λ)/(4πd)⎞⎠2 [Watt]
Ovviamente, anche il ricevitore ha la propria Zi
= Z*R
accordata per il massimo trasferimento di potenza, e la banda di segnale
è sempre stretta a sufficienza da garantire l’assenza di distorsioni
lineari. Quindi la WR =
WdR è proprio la potenza ricevuta. Attenuazione
di spazio libero↓
Il termine
è chiamato attenuazione di spazio libero, e dipende da f2
oltreché da d2. In
realtà ai fini del bilancio di collegamento, la dipendenza dalla
frequenza si elide con quella relativa al guadagno delle antenne: GT = Ae(4π)/(λ2) = Ae(4πf2)/(c2) ( [741] [741] Mantenendo
fissa la dimensione delle antenne, si ottiene il risultato che
trasmissioni operanti a frequenze più elevate permettono di
risparmiare potenza. Purtroppo però, guadagni di antenna superiori a
30-40 dB (corrispondenti a piccoli valori di θb)
sono controproducenti, per i motivi esposti al § 16.3.3.1↓.).
Attenuazione
disponibile↓
Il rapporto
è chiamato attenuazione disponibile, ed indica di quanto si
riduce la potenza trasmessa. Il suo valore espresso in decibel, tenendo
conto delle costanti che vi compaiono, ed usando le unità di misura più
idonee, risulta essere
nota come equazione di Friis↓.
Osserviamo che, a differenza della trasmissione in cavo, l’attenuazione
cresce con il quadrato della distanza, e quindi con il suo logaritmo
quando espressa in decibel. Infatti ora l’attenuazione è dovuta
esclusivamente all’aumentare della superficie su cui si distribuisce la
potenza irradiata, e non a fenomeni dissipativi, come accade invece per
cavo (eq. (16.109↑))
e fibra ottica. Per un esempio di applicazione della (16.115↑), si veda
l’esercizio a pag. 1↑.
- perdite di accoppiamento: sono dovute al mancato verificarsi delle condizioni di massimo trasferimento di potenza, ed ammontano a qualche dB;
- assorbimento terrestre↓: quando l’antenna è distante dal suolo meno di qualche lunghezza d’onda, l’energia si propaga anche per onda superficiale [742] [742] http://it.wikipedia.org/wiki/Onda_superficiale, ovvero la crosta terrestre fa da conduttore. Ciò permette la ricezione anche in assenza di visibilità tra antenne, subendo però una attenuazione che aumenta con la frequenza, tanto che già a 3 MHz raggiunge i 25 dB [743] [743] equivalente ad una riduzione di potenza di 102.5 = 316 volte ogni 10 Km. Le onde medie (0,3-3 MHz) sono meno attenuate, ed ancora meno le onde lunghe (10-300 KHz) che viaggiano appunto via terra.
16.3.3 Condizioni di propagazione↓ e attenuazioni supplementari
Sono ora descritti i fenomeni legati alla
geometria del territorio ed alle condizioni atmosferiche, che
determinano l’insorgenza di attenuazioni supplementari As
ovvero in più, da sommare al valore Ad(dB)
fornito dalla (16.115↑)
per ricavare la potenza realmente ricevuta.
16.3.3.1 Condizioni di visibilità
Come ricavabile anche dall’espressione dell’area
efficace (16.112↑),
all’aumentare della frequenza si possono ottenere antenne di dimensioni
ridotte e contemporaneamente di elevato guadagno. Allo stesso tempo, per
evitare l’assorbimento terrestre, occorre posizionare l’antenna in alto
(in cima ad una torre), e trasmettere per onda diretta↓,
condizione nota anche come los↓ o line
of sight.
A causa della curvatura terrestre, esiste una
altezza minima da rispettare: ad esempio con torri da 60 metri si
raggiungono distanze (in visibilità) di 50 Km. Ovviamente, il problema
si presenta in pianura. Tratte più lunghe richiedono torri più alte, ma
anche guadagni di antenna maggiori (e quindi antenne più grandi e più
direttive). Questa non è però una soluzione molto praticabile, in quanto
in presenza di vento forte le antenne “grandi” possono spostarsi e
perdere il puntamento; inoltre, il costo delle torri aumenta
esponenzialmente con l’altezza.
Nel calcolare l’altezza delle torri (ed il
puntamento delle antenne) si deve
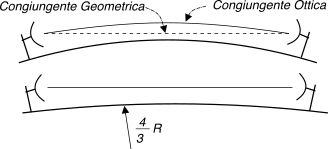 considerare anche il fenomeno legato al fatto che l’onda
elettromagnetica, propagandosi, si piega verso gli strati
dell’atmosfera con indici di rifrazione maggiori (ossia verso terra).
Pertanto, i calcoli vengono effettuati supponendo che il raggio
terrestre sia per 4 ⁄ 3 maggiore di
quello reale. Inoltre, l’indice di rifrazione (che aumenta verso il
basso) può variare con l’ora e con le condizioni climatiche: pertanto,
anche in questo caso, le antenne con guadagni elevati (e molto
direttive) possono andare fuori puntamento.
considerare anche il fenomeno legato al fatto che l’onda
elettromagnetica, propagandosi, si piega verso gli strati
dell’atmosfera con indici di rifrazione maggiori (ossia verso terra).
Pertanto, i calcoli vengono effettuati supponendo che il raggio
terrestre sia per 4 ⁄ 3 maggiore di
quello reale. Inoltre, l’indice di rifrazione (che aumenta verso il
basso) può variare con l’ora e con le condizioni climatiche: pertanto,
anche in questo caso, le antenne con guadagni elevati (e molto
direttive) possono andare fuori puntamento.
Ellissoidi
di Fresnel↓
Anche se le antenne si trovano in condizioni di
visibilità, occorre tenere conto dei fenomeni di diffrazione↓ [744] [744] http://it.wikipedia.org/wiki/Diffrazione,
che deviano nella zona in ombra le onde radio
che transitano in prossimità di ostacoli [745] [745] Lo
stesso fenomeno di diffrazione è egualmente valido per l’energia
luminosa, e può essere sperimentato illuminando una fessura, ed
osservando le variazioni di luminosità dall’altro lato..
Pertanto, la determinazione dell’orizzonte radio deve prevedere un margine
di distanza h tra la
congiungente delle antenne ed il suolo, od un eventuale ostacolo.
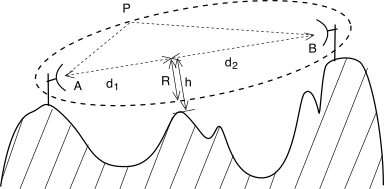
R = √((λ)/((1)/(d1) + (1)/(d2)))
che, nel caso d1 = d2
= (d(A, B))/(2), assume il valore massimo
RM = (1)/(2)√(λd).
Qualora si determini la condizione h <
R, il collegamento subisce una attenuazione
supplementare che aumenta al diminuire di (h)/(R), ed è maggiore per gli spigoli
vivi, fino ad arrivare ad una decina di dB. 16.3.3.2 Diffusione e riflessione atmosferica


Per frequenze sotto il MHz la propagazione è per onda
di terra, e l’assorbimento terrestre impedisce di coprire grandi
distanze (tranne che per le onde lunghe, meno attenuate). Anche
in questo caso può verificarsi la diffusione troposferica, specie di
notte.
16.3.3.3 Assorbimento atmosferico↓
Per lunghezze d’onda di dimensione comparabile a
quella delle molecole di ossigeno, si produce un fenomeno dissipativo di
assorbimento; le frequenze interessate sono quelle superiori a 30
GHz, con un massimo di 20 dB/Km a 60 GHz( [749] [749] L’elevata
attenuazione chilometrica presente a 60 GHz può essere sfruttata nei
sistemi di comunicazione cellulare, allo scopo di riusare una stessa
banda di frequenze anche a breve distanza.). Inoltre,
il vapor d’acqua (con molecole di dimensioni maggiori) produce una
attenuazione supplementare di 1-2 dB/Km (al massimo) a 22 GHz [750] [750] L’assorbimento
di potenza da parte delle molecole d’acqua per onde
elettromagnetiche a 22 GHz è il principio su cui si basa il forno a
microonde.. Sotto i 10 GHz non si verifica
assorbimento né da ossigeno, né da vapore.
16.3.3.4 Dimensionamento di un collegamento soggetto a pioggia
In caso di pioggia, si manifesta una ulteriore
causa di assorbimento atmosferico, detto appunto da pioggia, che
costituisce la principale fonte di attenuazione supplementare per
frequenze superiori a 10 GHz. L’attenuazione supplementare da pioggia
aumenta con la frequenza portante, con l’intensità di precipitazione e
con l’estensione della zona piovosa lungo il tragitto radio; questi
ultimi due fattori sono evidentemente elementi aleatori, e per questo il
dimensionamento mira a stabilire quale sia il margine necessario a
garantire un grado di servizio prefissato. Il margine necessario, è
pertanto pari al valore di attenuazione supplementare che viene superato
con una probabilità minore o uguale al grado di servizio.
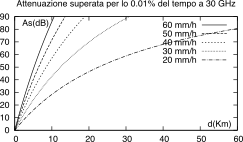
Una formula sperimentale che consente di
determinare il valore in dB dell’attenuazione supplementare che viene
superato con probabilità p è:
As(r0,
d, p) = K⋅rα0⋅d⋅β(d)⋅γ(p) [dB]
in cui r0 è l’intensità
di precipitazione (in mm/h) che viene superata per lo 0.01 % del tempo,
d è la lunghezza del collegamento,
e K ed α
sono costanti che caratterizzano l’entità dell’interazione dell’onda
radio con la pioggia, in funzione della frequenza portante e di altre
condizioni climatiche ed ambientali, i cui valori medi sono riportati
nella tabella che segue.| f0(GHz) | 10 | 15 | 20 | 25 | 30 | 35 |
| α | 1.27 | 1.14 | 1.08 | 1.05 | 1.01 | .97 |
| K | .01 | .036 | .072 | .12 | .177 | .248 |
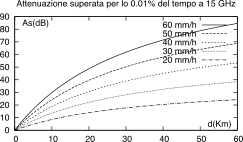
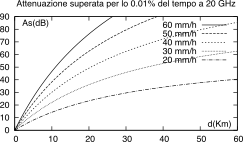
Il valore di r0 per l’Italia è compreso tra 20 e 60 mm/h, mentre il termine γ(p) = 6.534⋅10 − 3⋅p − (.718 + .043⋅log10p), che vale 1 per p = 10 − 4, permette di tener conto del grado di servizio che si vuole ottenere. Infine, β(d) = 1 ⁄ (1 + .0286⋅d) è un fattore correttivo che tiene conto del fatto che non piove lungo tutto il collegamento. I grafici in fig. 16.16↓mostrano l’andamento del termine K⋅rα0⋅d⋅β(d) per diversi valori di f0 ed r0, in funzione dell’estensione del collegamento; infine, è riportato il grafico della funzione γ(p) per diversi valori di p.

Dimensionare un collegamento imponendo un margine
elevato può dar luogo a problemi dal lato del ricevitore, che potrebbe
trovarsi ad operare in regione non lineare a causa dell’eccesso di
potenza ricevuta, qualora non siano presenti le attenuazioni
supplementari: può essere allora utilizzato un canale di ritorno
nell’altra direzione, in modo da regolare la potenza del trasmettitore.
Esempio Un ponte radio numerico opera tra due località
distanti 50 Km con una portante f0
= 15 GHz. Valutare l’attenuazione supplementare superata
per lo 0.1% del tempo, nell’ipotesi che l’intensità di
precipitazione superata per lo 0.01% del tempo sia pari a 40 mm/h.
Svolgimento Dal
primo grafico di fig. 16.16↑
si ricava un valore di A10 − 4s
≥ 50 dB per lo 0.01% del tempo; considerando invece un
grado di servizio 10 volte peggiore, occorre considerare il
fattore γ(10
− 3)≃ 0.45, e
dunque A10 − 3s
≥ 50 ⋅ 0.45 = 22.5 dB.
16.3.3.5 Cammini multipli↓
Oltre i 30 MHz, nonostante la direttività delle
antenne, alcuni raggi obliqui possono incontrare superfici riflettenti
come laghi o masse d’acqua, essere riflessi dagli strati atmosferici, o
percorrere notevoli distanze nei condotti atmosferici [751] [751] Nel
caso in cui una massa d’aria calda ne sovrasti una più fredda, si
verifica una inversione dell’indice di rifrazione, e l’onda
elettromagnetica di propaga come in una guida d’onda, vedi anche http://en.wikipedia.org/wiki/Tropospheric_propagation.
per poi tornare al suolo, e causare la ricezione di una (o più) eco
ripetuta dello stesso segnale. In questi casi il collegamento si dice
affetto da multipath↓, e può essere
caratterizzato mediante una risposta impulsiva del tipo
in cui i valori τn
sono i ritardi con cui si presentano le diverse eco, ognuna
caratterizzata da una ampiezza an,
in accordo allo schema di filtro trasversale presentato al § 6.7↑.
La corrispondente risposta in frequenza
H(f) = N⎲⎳n
= 1ane − j2πfτn
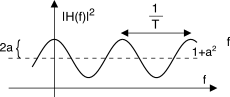
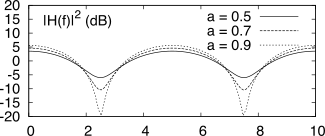
può produrre distorsione lineare; come esempio, consideriamo il caso di
una eco singola con ritardo T,
per il quale (vedi § 6.7.2↑)
il modulo quadro della risposta in frequenza risulta
|H(f)|2 =
1 + a2 + 2acos2πfT
periodico in frequenza con periodo f = (1)/(T), mostrato in fig. 16.17↓,per valori
lineari ed in dB, e per diverse
scelte di a. Osserviamo che per
valori di a prossimi ad 1, la
risposta in frequenza presenta una notevole attenuazione nell’intorno di
f = (2k + 1)/(2T),
di fatto impedendo la trasmissione su tali frequenze; inoltre,
all’aumentare di T le oscillazioni
di |H(f)|2
si infittiscono [752] [752] Ad
esempio, desiderando (1)/(T) > 1 MHz, si ottiene
TMax = 1 μsec; se l’onda radio si propaga
alla velocità c = 3⋅108
m/sec, la massima differenza di percorso vale Δmax
= c⋅TMax = 3⋅108⋅10
− 6 = 300 metri. , e dunque aumenta
la possibilità che |H(f)|2 vari di molto nella
banda del segnale, causando una distorsione lineare che sarà necessario
equalizzare.
Modello
two-ray ground-reflected↓
E’ il nome attribuito allo schema descritto
dall’esempio precedente, esteso ad un caso generale in cui vengono prese
in considerazione possibili altezze differenti per le antenne, il cui
guadagno viene considerato variabile in funzione dell’angolo di
emissione, e sono prese in considerazione le caratteristiche del
coefficiente di riflessione al suolo. L’approfondita analisi [753] [753] Vedi
ad esempio https://en.wikipedia.org/wiki/Two-ray_ground-reflection_model,
da cui è tratta l’immagine mostrata. Molto interessante, anche
l’applet java disponibile presso http://www.cdt21.com/resources/siryo1_02.asp,
che grafica l’andamento della attenuazione del modello, al variare
di alcuni dei parametri prima illustrati. di tali
particolarità porta al risultato che, per distanze
 brevi tra le antenne le onde diretta e riflessa si sommano
costruttivamente, producendo ad un guadagno anziché ad una attenuazione;
aumentando la distanza si assiste ad una attenuazione che cresce con d2, come per il caso di
spazio libero, ma con sovrapposta l’oscillazione su illustrata, e che
dipende dalla geometria del problema. Oltre un distanza detta critica,
e che corrisponde alla prima zona di Fresnel, l’attenuazione
aumenta con d4.
brevi tra le antenne le onde diretta e riflessa si sommano
costruttivamente, producendo ad un guadagno anziché ad una attenuazione;
aumentando la distanza si assiste ad una attenuazione che cresce con d2, come per il caso di
spazio libero, ma con sovrapposta l’oscillazione su illustrata, e che
dipende dalla geometria del problema. Oltre un distanza detta critica,
e che corrisponde alla prima zona di Fresnel, l’attenuazione
aumenta con d4.
Il
fading piatto↓
Qualora la banda del segnale sia
sufficientemente piccola rispetto a (1)/(T),
e si possa considerare |H(f)|2 costante in tale banda
(pag. 1↑),
l’attenuazione dovuta alla presenza di cammini multipli prende il nome
di flat fading (vedi § 16.3.4.5↓).
Il termine fading si traduce come affievolimento o evanescenza,
ma è spesso usato in inglese, cosicché l’assenza di distorsione lineare
per segnali a banda stretta è anche detta condizione di fading
piatto, sottintendendo in frequenza. Nel seguito ci si
continua a riferire alle attenuazioni supplementari con il termine più
generale di fading.
16.3.3.6 Collegamento in diversità↓
Il
fading prodotto da cammini multipli viene detto selettivo in
frequenza quando |H(f)|2 varia in modo rilevante,
e ciò accade specialmente quando due repliche del segnale giungono al
ricevitore con ampiezze molto simili. Il problema può essere affrontato
prevedendo una ridondanza↓
degli apparati.
Diversità
di frequenza↓
La stessa trasmissione è effettuata mediante due diverse
portanti: nel caso in cui una delle due subisca attenuazione, la
trasmissione che utilizza l’altra portante ne è probabilmente esente (o
viceversa).
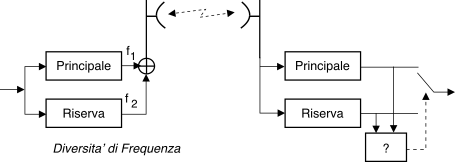 Se il collegamento è condiviso tra diverse trasmissioni, una
unica via di riserva può essere impiegata per fornire una
ridondanza N:1. Ad esempio, in una
trasmissione multiplata fdm (§ 9.1.1.2↑), la portante
di riserva viene assegnata al canale del banco fdm
che presenta la maggiore attenuazione.
Se il collegamento è condiviso tra diverse trasmissioni, una
unica via di riserva può essere impiegata per fornire una
ridondanza N:1. Ad esempio, in una
trasmissione multiplata fdm (§ 9.1.1.2↑), la portante
di riserva viene assegnata al canale del banco fdm
che presenta la maggiore attenuazione.
Diversità
di spazio↓
Adottando due diverse antenne riceventi in posizioni differenti, la
differenza di percorso T tra
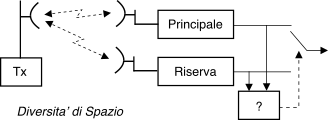 cammini multipli è differente per le due antenne, e dunque la risposta
in frequenza |H(f)|2 = 1 + a2 + 2acos2πfT
ha una diversa periodicità nei due casi. Pertanto, anche se un
ricevitore subisce una attenuazione selettiva, l’altro ricevitore ne è
esente.
cammini multipli è differente per le due antenne, e dunque la risposta
in frequenza |H(f)|2 = 1 + a2 + 2acos2πfT
ha una diversa periodicità nei due casi. Pertanto, anche se un
ricevitore subisce una attenuazione selettiva, l’altro ricevitore ne è
esente.
Esempio Utilizzando gli stessi dati del precedente esempio,
valutiamo cosa accade se la riserva viene posta dieci metri più
indietro dell’antenna principale. In tal caso il nuovo ritardo
tra il raggio diretto e quello riflesso diviene pari a T’
= 65.3 nanosecondi contro i T
= 66.0 nsec ottenuti per la via principale, e dunque |H(f)|2
per la riserva ha un periodo pari a 1⁄T’
= 15.29 MHz, una differenza di 140 KHz. Per ottenere che i
minimi della |H(f)|2 nei due casi siano
distanziati di almeno 3 Mhz, ovvero il 20% del periodo in frequenza,
occorre operare con portanti oltre i 300 MHz.
16.3.4 Collegamenti radiomobili ↓
Le condizioni di propagazione per comunicazioni
radiomobili, come nel caso della telefonia cellulare, presentano diversi
aspetti particolari che influenzano il fading.
Infine, l’uso condiviso di una stessa
banda di frequenze radio da parte di una moltitudine di terminali,
determina la necessità di riusare le stesse frequenze in regioni
differenti [755] [755] Vedi
ad es. il § 9.1.1.3↑.,
e l’attuazione di meccanismi di codifica di canale (§ 11.3↑) per ridurre
gli effetti delle interferenze e del fading variabile [756] [756] Mentre
il fading produce una attenuazione variabile sul segnale, la stessa
variabilità delle condizioni di propagazione può portare a livelli
di interferenza variabili, causati da altre trasmissioni nella
stessa banda. La variabilità temporale della qualità del segnale
ricevuto, in particolare quella veloce (vedi § 16.3.4.6↓), produce
errori a burst, che possono essere corretti mediante
codifica di canale ed interleaving (vedi § 8.4.2.3↑)..
Analizziamo nel seguito i fenomeni legati alla posizione ed all’ambiente,
fornendo modelli che descrivono le attenuazioni supplementari ed
i fenomeni di multipath variabile, rimandando la discussione
sulle tecniche di accesso multiplo ad una prossima edizione.
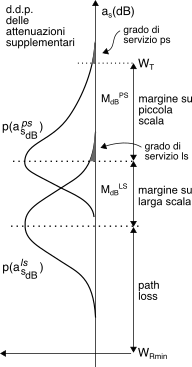
16.3.4.1 Le componenti del fading↓↓
Il bilancio di collegamento descritto dalla
figura di pag. 1↑
può essere impostato come illustrato in fig. 16.22↓,
considerando una componente di attenuazione nominale indicata
come path loss (o attenuazione di percorso), e due componenti
aleatorie di attenuazione supplementare legate a posizione e movimento,
indicate rispettivamente come fading su larga scala o shadowing
(ombreggiatura) e su piccola scala.
Il valore del path loss Apl
risulta maggiore di quello di Asl
(eq. 16.113↑)
a causa delle condizioni di propagazione non ideali, causando una Ad più elevata, come
analizzato al § 16.3.4.2↓.
L’attenuazione supplementare su larga scala alss
tiene conto dei fenomeni lentamente variabili nel tempo, come la
frapposizione di rilievi, edifici, ed alberi: essa non varia di molto
con il movimento del ricevitore, ed al § 16.3.4.3↓
si mostra come il suo valore possa considerarsi quello di una
v.a. gaussiana in dB a media nulla e varianza σ2ls,
consentendo di determinare il margine su larga scala MlsdB
come quel valore di alssdB
che viene superato con probabilità sufficientemente bassa.
La variabilità su piccola scala è quella
che maggiormente caratterizza il fading, e tiene conto degli
innumerevoli cammini multipli presenti in ambito urbano ed indoor,
che possono produrre una attenuazione supplementare apssdB
maggiore del caso precedente, una H(f)
selettiva in frequenza, e se è presente movimento del ricevitore e/o
delle superfici riflettenti, la variabilità temporale di apssdB;
a seconda se la rapidità di variazione sia maggiore o minore del periodo
di simbolo, si distingue ulteriormente in fast e slow fading.
Questi effetti sono analizzati al § 16.3.4.4↓,
dove si determina il margine MpsdB
tale da rendere trascurabile la probabilità che apssdB
> MpsdB; mentre ai § 16.3.4.5↓ e 16.3.4.6↓ si illustrano
gli effetti dei fenomeni di variabilità in frequenza e nel tempo.
La fig. 16.22↑
mostra come queste tre componenti di attenuazione si sommano [757] [757] Considerando
le v.a. statisticamente indipendenti. al fine di
determinare la potenza che occorre trasmettere
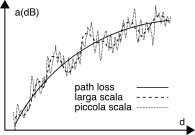 mentre quella a lato tenta di rappresentare come varia la somma dei tre
contributi di attenuazione con la posizione del ricevitore.
mentre quella a lato tenta di rappresentare come varia la somma dei tre
contributi di attenuazione con la posizione del ricevitore.
WT = WRmin
+ Ad + MlsdB + MpsdB
16.3.4.2 Path loss↓
La dipendenza della attenuazione dal quadrato della distanza espressa
dalla (16.113↑)
si riferisce al caso ideale di spazio libero; misurazioni reali
mostrano che invece l’esponente di d
aumenta fino alla quarta potenza, a seconda del tipo di ambiente
(urbano, rurale) e dell’altezza dell’antenna ricevente [758] [758] Inoltre,
la condizione di nlos introduce
una attenuazione supplementare costante. Per una rassegna
dei diversi modelli di propagazione, si veda ad es. http://www.slideshare.net/deepakecrbs/propagation-model..
Pertanto, il termine 20log10d(Km)
che compare in (16.115↑)
viene sostituito con Apl
= n⋅10log10d(Km) + α, e quindi in questo caso
anziché la (16.115↑),
l’espressione da usare per l’attenuazione disponibile è
in cui n ed α
sono determinati in base a campagne di misura, e tengono conto
delle condizioni operative. Il valore di n
varia da 4 a 3 con d < 100
metri, all’aumentare dell’altezza dell’antenna fissa, mentre il termine
α può variare da 7
a 15 dB con antenna fissa alta 30
e 10 metri rispettivamente, e subire un
incremento di quasi 30 dB passando da un
ambiente aperto ad un ambito urbano.
Esempio Valutare il path loss per un collegamento a 2 GHz
lungo un chilometro, considerando le antenne omnidirezionali, in un
ambiente per il quale sono stati stimati i parametri n
= 4 e α = 32.
E’
sufficiente applicare la (16.117↑)
utilizzando i valori forniti per i parametri:
Ad(dB) =
32.4 + 20log102⋅103 + 4⋅10log101
+ 32 = 130.4 dB.
16.3.4.3 Fading su larga scala↓ e shadowing↓
La stima delle grandezze n
ed α ora introdotte è svolta mediando
i risultati di diverse misure condotte nel territorio che si intende
caratterizzare, che in realtà variano con il movimento tra territori
diversi, in cui si riscontrano valori di fading diversi, anche per
uguali valori di d. Questo
fenomeno è indicato come slow fading oltre che su larga
scala, poiché non si presenta muovendosi di poco in una stessa
zona, dipendendo dalla orografia del territorio e dalla natura degli
oggetti limitrofi. Ma anche stando fermi, non conoscendo a priori in che
zona ci si trovi, l’effetto del fading su larga scala (ls)
si manifesta come una attenuazione supplementare as
aleatoria, che risulta avere un andamento gaussiano in dB [759] [759] La d.d.p. gaussiana discende
dall’ipotesi che uno dei cammini multipli pervenga al ricevitore con
una potenza nettamente predominante rispetto agli altri. In questo
caso l’inviluppo complesso x
del segnale ricevuto è adeguatamente rappresentato da una v.a. di
Rice (vedi pag. 1↑)
x = a + r,
in cui |r| ha d.d.p. di Rayleigh e
rappresenta l’effetto di molte cause indipendenti, relative ai
cammini multipli, ed a è
l’ampiezza della eco di segnale ricevuta con la maggiore ampiezza.
Se a≫|r| possiamo scrivere
as(dB)
= 10log10(1)/(|a
+ r|2) = − 10log10((a
+ rc)2
+ r2s)
=
=
− 10log10(a2)/(a2)(a2 + 2arc
+ r2c + r2s) = 10⎛⎝log10a2
+ log10⎛⎝1 + (2rc)/(a) + (|r|2)/(a2)⎞⎠⎞⎠
=
≃10⎛⎝log10a2
+ (2rc)/(a)⎞⎠ =
10log10a2 + 20(rc)/(a)
in quanto log(1 + α)≃α
con α≪1, e quindi as(dB)
ha media 10log10a2
(compresa nel path loss) ed esibisce una d.d.p. gaussiana,
la stessa di rc.
(per questo detto lognormale) ed a media nulla,
cioè del tipo
pAs(as(dB)) = (1)/(√(2π)σ)e − ((as(dB))2)/(2σ2ls)
dove σls varia
tra 6 ed 8
dB per una altezza dell’antenna tra 5 e 15 metri [760] [760] All’aumentare
dell’altezza dell’antenna, si estende l’area di copertura della
stessa, ma in ambito urbano questo corrisponde ad una maggiore
variabilità delle effettive condizioni operative.. Per
velocità del mobile non superiori ai 15
Km/h, si può assumere as
costante in frequenza per qualche MHz, e nel tempo per poche centinaia
di millisecondi. Esempio Una trasmissione los
per la quale occorre ricevere una potenza di almeno WR
= − 50 dBm è realizzata mediante un collegamento radio tra
antenne omnidirezionali poste a d =
20 Km e con portante f0
= 27 MHz. Determinare la potenza WslibT
che occorre trasmettere in condizioni di spazio libero, e la
nuova potenza WsfadT
necessaria a garantire una probabilità di fuori servizio pari al 5%,
in presenza di un fading su larga scala caratterizzato da σls = 3 dB.
Utilizziamo la (16.115↑)
per calcolare
Ad(dB)
= 32.4 + 20log10f(MHz) + 20log10d(Km) − GT(dB) − GR(dB) =
=
32.4 + 20log1027 + 20log1020 = 32.4 +
28.6 + 26 = 87 dB
da cui si ottiene
WslibT(dBm) = WR(dBm)
+ Ad(dB) = − 50 + 87 = 37 dBm
pari a 7 dBW ovvero 100.7
= 5 Watt. Il fading su larga scala produce una attenuazione
supplementare aleatoria con d.d.p. gaussiana in dB, e la probabilità
di fuori servizio del 5% corrisponde al punto della curva di pag. 1↑
per cui 0.05 = (1)/(2) erfc⎛⎝(MlsdB)/(√(2)σls)⎞⎠,
e quindi graficamente si ottiene (MlsdB)/(√(2)σls) = 1.5, da cui MlsdB
= 1.5⋅√(2)⋅3
= 1.5⋅1.41⋅3 = 6.3 dB, che ci consente di calcolare la
nuova WsfadT come WsfadT(dBW)
= WslibT(dBW) + MlsdB
= 7 + 6.3 = 13.3 dBW, ovvero
101.33 = 21.4 Watt.↓
16.3.4.4 Fading su piccola scala↓
Consiste nelle fluttuazioni di livello del
segnale radio osservate durante il movimento, causate dalla
variazione dei ritardi con cui i cammini multipli↓
giungono al ricevitore: spostandosi infatti di (λ)/(2) si può passare [761] [761] A
frequenza di 1 Ghz, si ha λ≃30
cm. Questo fenomeno può essere facilmente sperimentato quando,
durante una sosta al semaforo, si perde la sintonia di una radio fm, riacquistandola per piccoli
spostamenti dell’auto; un altro esempio può essere la ricerca
del campo per poter telefonare. da una
situazione di somma coerente ad una completa opposizione di fase.
Analizziamo ora la situazione nel dettaglio, distinguendo tra diversi
casi-tipo.
Fading
piatto↓
L’inviluppo complesso del segnale ricevuto y(t)
in presenza di cammini multipli può essere espresso in funzione di
quello trasmesso x(t) considerando che la (16.116↑)
consente di scrivere il segnale ricevuto come y(t) = ∑Nn = 1anx(t − τn) da cui si ottiene [762] [762] La (16.118↓)
discende dal considerare un generico segnale modulato x(t) =
a(t)cos(2πf0t
+ φ(t)) ed il suo inviluppo complesso x(t) = a(t)ejφ(t): per ogni sua replica
ritardata xn(t) = x(t
− τn)
possiamo scrivere
 in cui il valore complesso X + jY
= ρejφ = ∑Nn = 1ancosφn
− j∑Nn
= 1ansinφn
riassume l’effetto delle diverse repliche, e rappresenta un
v.a. gaussiana complessa,
in quanto a partire da valori della portante f0
dell’ordine dell’inverso di (1)/(τn),
e tanto più per f0 più
elevate [764] [764] Se ad
esempio i ritardi τn
sono dell’ordine di 10 − 8,
l’ipotesi è valida per f0
> 100 MHz, quasi 1⁄10
delle frequenze a cui operano i radiomobili., bastano
piccole variazioni di ritardo τn
per produrre una fase φn
= 2πf0τn
(nota 347↑)
uniformemente distribuita tra 0 e 2π e del tutto indipendente per le
diverse repliche. Pertanto, se anche i valori an
sono realizzazioni di v.a. indipendenti ed equidistribuite, e se i
cammini multipli sono in numero elevato, si applica il teorema centrale
del limite (§ 5.2.4↑),
e quindi i valori di X ed Y
nella (16.119↑)
possono considerarsi realizzazioni di v.a. indipendenti, gaussiane, a
media nulla ed uguale varianza σ2.
in cui il valore complesso X + jY
= ρejφ = ∑Nn = 1ancosφn
− j∑Nn
= 1ansinφn
riassume l’effetto delle diverse repliche, e rappresenta un
v.a. gaussiana complessa,
in quanto a partire da valori della portante f0
dell’ordine dell’inverso di (1)/(τn),
e tanto più per f0 più
elevate [764] [764] Se ad
esempio i ritardi τn
sono dell’ordine di 10 − 8,
l’ipotesi è valida per f0
> 100 MHz, quasi 1⁄10
delle frequenze a cui operano i radiomobili., bastano
piccole variazioni di ritardo τn
per produrre una fase φn
= 2πf0τn
(nota 347↑)
uniformemente distribuita tra 0 e 2π e del tutto indipendente per le
diverse repliche. Pertanto, se anche i valori an
sono realizzazioni di v.a. indipendenti ed equidistribuite, e se i
cammini multipli sono in numero elevato, si applica il teorema centrale
del limite (§ 5.2.4↑),
e quindi i valori di X ed Y
nella (16.119↑)
possono considerarsi realizzazioni di v.a. indipendenti, gaussiane, a
media nulla ed uguale varianza σ2.
xn(t) = a(t
− τn)cos[2πf0(t
− τn) + φ(t − τn)] = a(t − τn)cos(2πf0t
− 2πf0τn + φ(t − τn))
ed il suo inviluppo complesso rispetto ad f0
può essere quindi scritto come
xn(t) = a(t − τn)ejφ(t
− τn)e
− j2πf0τn
= x(t − τn)e − j2πf0τn
in cui τn è il
ritardo dell’n-esimo cammino, ed an il rispettivo
guadagno. Se durante il tempo che intercorre tra l’arrivo della prima
replica (ritardata di τmin)
e l’arrivo dell’ultima (ritardata di τmax)
il segnale x(t) non varia di molto (e cioè x(t − τmin)≃x(t
− τn)≃x(t − τmax)) [763] [763] Si
consideri che il risultato dell’esempio di pag. 1↑
valuta i ritardi in gioco dell’ordine di grandezza delle decine di
nanosecondi, mentre (ad esempio) ad un segnale x(t)
limitato in banda a 10 KHz corrisponde un periodo di campionamento Tc = 50 μsec.,
l’effetto complessivo equivale alla moltiplicazione di x(t)
per un numero complesso, senza quindi produrre distorsione lineare (vedi
pag. 1↑).
Infatti, in tal caso la (16.118↑)
può essere riscritta come
(16.119)
y(t)
≃
x(t)N⎲⎳n = 1ane − j2πf0τn
= x(t)N⎲⎳n = 1an(cosφn − jsinφn)
=
x(t)⋅(X + jY)
= x(t)⋅ρejφ
Per ciò che riguarda l’ampiezza del
segnale ricevuto, risulta |y(t)| = ρ⋅|x(t)|, e nelle condizioni descritte ρ = √(X2
+ Y2)
è una v.a. di Rayleigh (pag. 1↑), la cui d.d.p. ha
espressione
con ρ ≥ 0; pertanto il valore
della potenza istantanea ricevuta, legata [765] [765] Per
semplicità nel seguito consideriamo x(t)
a potenza unitaria, in modo che ρ2
sia proprio la potenza istantanea
 ricevuta. a |y(t)|2 = ρ2|x(t)|2, risulta variato di una
quantità pari a ρ2, che
è una v.a. esponenziale negativa [766] [766]
ricevuta. a |y(t)|2 = ρ2|x(t)|2, risulta variato di una
quantità pari a ρ2, che
è una v.a. esponenziale negativa [766] [766]
 il margine MpsdB necessario a
contrastare un fading di Rayleigh,
qualora si desideri una probabilità
di fuori servizio pari a p:↓
il cui andamento è mostrato sopra.
il margine MpsdB necessario a
contrastare un fading di Rayleigh,
qualora si desideri una probabilità
di fuori servizio pari a p:↓
il cui andamento è mostrato sopra.
Impostando il
cambiamento di variabile s = ρ2,
si possono applicare le regole viste al § 5.4↑,
individuando la funzione inversa come ρ
= √(s),
la cui (d)/(ds)ρ(s)
fornisce (1)/(2√(s)).
Pertanto, la d.d.p. della nuova v.a. s
vale:
, descritta dalla d.d.p. (vedi § 17.2.1↓)
in cui si è posto in evidenza il valor medio mρ2
= E{ρ2}
= 1⁄λ
= 2σ2. In base alla
(16.121↑)
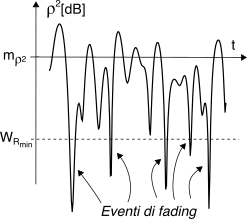
è possibile determinare [767] [767] A tal fine osserviamo che il
collegamento va fuori servizio quando la potenza ricevuta è
inferiore alla sensibilità del ricevitore WRmin,
e la probabilità di questo evento si esprime come p
= Pr(ρ2 <
WRmin)
= 1 − e − (WRmin)/(mρ2), essendo
appunto ρ2 una
v.a. a d.d.p. esponenziale con media mρ2
= 2σ2, e tenendo conto dell’eq. (19.3↓) a pag. 1↓. Al tempo stesso, mρ2 = E{ρ2}
rappresenta la potenza media ricevuta, ovvero lo zero dB
di fig. 16.27↓:
esprimendo dunque il margine M
(non in dB) come il rapporto tra la potenza media ricevuta e la
sensibilità del ricevitore M = (mρ2)/(WRmin), si ottiene p
= 1 − e − (1)/(M), e quindi − (1)/(M)
= ln(1 − p)
e, passando ai decibel, − 10log10M
= 10log10( − ln(1
− p)),
da cui la (16.122↓).
pS(s) = pP(√(s))⋅(d)/(ds)ρ(s)
= (√(s))/(σ2) e
− ((√(s))2)/(2σ2)⋅(1)/(2√(s)) = (1)/(2σ2) e
− (s)/(2σ2)
Nella figura a lato si mostra il processo di costruzione grafica
che produce una d.d.p. esponenziale negativa a partire dal
quadrato di una d.d.p. di Rayleigh.
Nel caso in cui trasmettitore, ricevitore ed ambiente siano statici,
ρ assume una determinata
realizzazione, distribuita come indicato dalla (16.120↑).
Al contrario se (ad es.) il ricevitore è in movimento, i cammini
multipli si modificano, e la figura 16.27↑
mostra come varia la potenza in dB del segnale ricevuto, relativamente
alle condizioni di ricezione medie (ovvero su larga scala,
rappresentate dalla condizione di zero dB), per posizioni via via più
distanti: si nota chiaramente come la potenza possa diminuire anche di
molto, condizione indicata come deep fade.

Frequenza
e durata media del fading↓
Se è presente movimento a velocità costante, la
fig.16.27↑
rappresenta l’andamento di ρ2⁄mρ2
(dB) in funzione del tempo. In tal caso, è interessante valutare per
quanto tempo la potenza istantanea ρ2
del segnale ricevuto scende sotto la soglia WRmin,
e dunque valutare quanti bit, ricadendo in tale intervallo temporale,
saranno soggetti ad una Pe
peggiore di quella desiderata. Come osservato alla nota 348↑, la probabilità
che ρ2 sia minore di WRmin
vale
 e la durata media a
di questo evento si ottiene dividendo p
per il numero medio Na
di affievolimenti per secondo [768] [768] Infatti
in tal modo la percentuale di tempo p
viene spalmata su di un secondo, e suddivisa per il numero
(medio) di volte (in un secondo) per cui avviene che ρ2
< WRmin.
e la durata media a
di questo evento si ottiene dividendo p
per il numero medio Na
di affievolimenti per secondo [768] [768] Infatti
in tal modo la percentuale di tempo p
viene spalmata su di un secondo, e suddivisa per il numero
(medio) di volte (in un secondo) per cui avviene che ρ2
< WRmin.
Esempio Se p = 0.1,
ed Na = 5
fading/sec, allora a
= 0.1⁄5 = 0.02 ossia 20
msec, ripartendo i 100 msec (10% di 1 secondo) sui 5
affievolimenti medi.
, ovvero a
= (p)/(Na). D’altra parte, si può
mostrare che risulta
(16.124)
Na = √(2π)fDαe
− α2
in cui si è posto α2 = (WRmin)/(mρ2) = (1)/(Mps),
mentre fD è la
massima deviazione doppler (pag. 1↓)
che come vedremo è direttamente legata alla velocità di movimento:
infatti, per velocità maggiori aumenta la frequenza dei fenomeni di
fading. Combinando le (16.123↑)
e (16.124↑)
si ottiene pertanto
il cui andamento normalizzato è rappresentato nella figura 16.29↓
assieme a quello di Na,
al variare di α ovvero di MpsdB
= 10log10(1)/(α2)
= − 20log10α.

Esercizio Valutare la durata media del fading di Rayleigh in
presenza di doppler fD
= 20 Hz e di un margine MpsdB
= 20 dB. Consideriamo quindi errato un bit, se durante il
suo periodo Tb
si verifica un affievolimento che rende la potenza istantanea
ricevuta minore di quella media per più di MpsdB.
In presenza di una modulazione bpsk
a velocità fb = 50
bit/sec, quanti sono in media i bit errati per secondo, e la
corrispondente Pbite?
Svolgimento Ad
un MpsdB = 20 dB
corrisponde α = 0.1, ed
in base alla (16.125↑) si ottiene a
= 2 msec, minore di Tb
= 1⁄50
= 20 msec, e quindi l’intervallo temporale per cui il
fading è maggiore del margine, interessa un solo bit. Mediante la
(16.124↑)
(con α = 0.1 e fD
= 20 Hz) si ottiene che Na
= 4.96 fading/sec, e dunque in un secondo risultano
errati quasi 5 bit su 50, ovvero Pbite
= 5⁄50
= 0.1.
Fading
di Rice↓
Si verifica nel caso in cui le ampiezze an
dei diversi percorsi che compaiono nella (16.118↑)
non sono identicamente distribuite, ma ne esiste una (a0
in figura) che prevale su tutte le altre, come quando l’antenna
trasmittente si trova in visibilità (anche parziale) del
ricevitore.
In questo caso il canale produce un guadagno
aleatorio ρ caratterizzato da una
d.d.p. di Rice, espressa dalla eq. (16.5↑)
a pag. 1↑,
essendo la risultante X + Y
tipicamente ora vicina al cammino prevalente a0 e − j2πf0τ0.
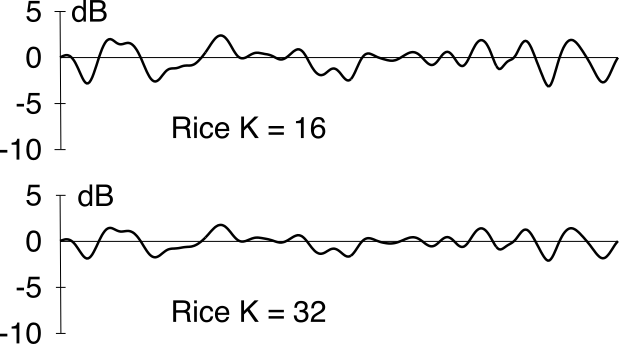
In particolare, il rapporto K = (a20)/(2σ2) tra la potenza (a20)/(2) dell’onda diretta e quella
σ2 della componente
dovuta al multipath prende il nome di fattore di Rice,
ed nella
figura a lato si mostra come, in presenza di una forte componente
diretta, la profondità del fading si riduce sensibilmente. In
corrispondenza di un K elevato, il
fading di Rice può infine essere descritto nei termini di un fading su
larga scala (§ 16.3.4.3↑),
come discusso alla nota 16.3.4.3↑.


Viceversa, qualora la ricezione avvenga
principalmente in assenza di visibilità, i valori del modulo
dell’inviluppo complesso del segnale ρ(t) = |y(t)| sono
soggetti al fading di Rayleigh precedentemente esposto.
16.3.4.5 Fading selettivo in frequenza↓
Rimuoviamo
ora l’ipotesi fatta a pag. 1↑
e assumiamo dunque che nell’intervallo temporale Δτ
= τmax − τmin
tra l’arrivo della prima e dell’ultima replica, detto anche dispersione
temporale↓, il segnale
possa modificare il suo valore. Per analizzare cosa succede,
partiamo dalla (16.118↑)
per scrivere l’espressione dell’inviluppo complesso della risposta
impulsiva del canale come [769] [769] Il
cambiamento negli indici della sommatoria è legato a considerare
l’origine dei tempi in corrispondenza al primo arrivato dei cammini
multipli.
in cui si è posto Zn = ane − j2πf0τn.
Facciamo quindi l’ipotesi semplificatrice che i ritardi τn
siano multipli di un comune intervallo T,
cioè τn = nT,
considerando eventualmente nullo qualche valore an:
in tal modo la (16.126↑)
può essere assimilata all’espressione di un segnale campionato (§ 4.1↑) h•(t) = ∑N − 1n =
0Znδ(t
− nT), interpretando dunque
i coefficienti complessi Zn
come campioni di un processo Z(t) [770] [770] Si sottintende che T
sia minore dell’inverso del doppio della banda di Z(t),
ovvero T < 1⁄2W.,
ovvero Zn = Z(nT) = ane − j2πf0nT.
Ciò consente di esprimere la risposta in frequenza equivalente di
b.f. del canale come la dtft (vedi § 4.3↑) della
sequenza Zn,
ovvero
Notiamo ora che i valori di H(f)
in funzione di f sono variabili
aleatorie, in quanto dipendono dalle caratteristiche statistiche dei
termini Zn, che
per i motivi illustrati a pag. 1↑
sono v.a. complesse, indipendenti ed a valor medio nullo, e quindi (vedi
§ 6.6.1↑)
in cui la sequenza di valori σ2an
= E{a2n} è indicata nel seguito come...
Dispersione
potenza-ritardo [771] [771] Libera
traduzione del termine power delay spread.
↓E’
costituita dalla sequenza Pn
= E{a2n} e rappresenta la distribuzione
temporale (media) della potenza (o energia) delle repliche del segnale.
Infatti, trasmettendo un impulso di energia unitaria δ(t)
si ricevono N impulsi di energia ℰn = a2n,
ovvero viene ricevuto l’inviluppo complesso h(t)
espresso dalla (16.126↑),
la cui energia vale ℰh
= ∫∞
− ∞h*(t)h(t)dt = ∑a2n
= ∑ℰn,
ed il cui valore atteso rispetto all’aleatorietà degli an
risulta E{ℰh} = ∑E{a2n}
= ∑ℰn.
Può
essere attuata con tre diverse tecniche, di cui ci si limita ad
accennare i principi operativi.
Nella prima
tecnica si trasmette una portante modulata in ampiezza da impulsi
molto brevi, ottenendo dopo demodulazione la convoluzione tra
l’impulso usato in trasmissione e l’h(t)
del canale: benché questa soluzione sia molto semplice, è affetta
sia dal rumore a larga banda che entra nel passa-banda di
ricezione, che dalle interferenze presenti.
La seconda
tecnica fa invece uso di una segnale dsss,
il cui despreading in ricezione avviene variando di volta in volta
la fase della pn: quando questa
risulta allineata temporalmente con una delle repliche dovute al
multipath, a valle del filtro passabasso si rivela un massimo
con ampiezza legata ad an.
In tal modo la sensibilità al rumore viene ridotta dal guadagno di
processo, ma la misura richiede il tempo necessario a provare
tutte le fasi della pn.
L’ultimo
metodo opera nel dominio della frequenza, e si basa su diverse
frequenze trasmesse una alla volta, le cui ampiezze e fasi sono confrontate
con quelle ricevute, come illustrato a pag. 1↑; i campioni
della H(f) così ottenuti sono quindi
antitrasformati mediante idft, per
ottenere i campioni di h(t). Ma per effettuare il confronto,
occorre che trasmettitore e ricevitore siano fisicamente vicini, e
dunque il metodo è applicabile solo per ambiti indoor.
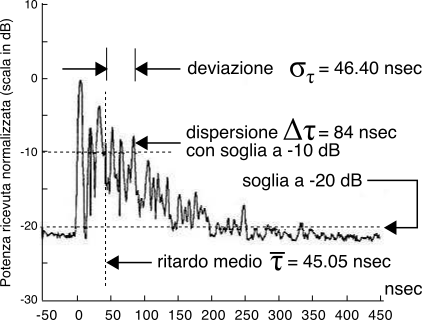
= ∑nPnτn⁄∑nPn
e la deviazione standard dei ritardi
στ
= √( − 2)
in cui
= ∑nPnτ2n⁄∑nPn,
mentre la dispersione temporale
Δτ = τmax
− τmin
è definita con riferimento ad una soglia che
permette di distinguere le repliche dal rumore.
La figura 16.31↑
mostra la curva di dispersione potenza-ritardo misurata per un
ambiente al coperto, per il quale sono calcolate , στ
e Δτ per una soglia di -10 dB. In
appendice 387↓
sono riportati alcuni valori tipici di questi parametri per diversi
contesti ambientali. L’andamento tendenziale rilevato per le Pn misurate
suggerisce l’approssimazione della dispersione potenza-ritardo mediante
una densità esponenziale:
Proseguiamo l’analisi con lo scopo di capire per
quale intervallo Δf si ottengano
coppie di valori della risposta in frequenza (H(f),
H(f
+ Δf)) che iniziano a
divenire incorrelati, dato che in tal caso un segnale che occupa
una banda comparabile a Δf è
affetto da distorsione lineare. A tal fine, partendo dalla (16.127↑)
interpretiamo H(f) come un processo ad aleatorierà
parametrica (§ 5.3.7↑)
in frequenza, e dunque ne calcoliamo la funzione di
autocorrelazione (appunto, in frequenza):
(16.130)
ℛH(Δf)
= E{H*(f)H(f + Δf)} =
=
N − 1⎲⎳n
= 0N
− 1⎲⎳m = 0E{Z*nZm}ej2πfnTe − j2π(f
+ Δf)mT = N − 1⎲⎳n = 0 Pne
− j2πΔfnT
in cui all’ultimo passaggio si è applicata la (16.128↑)
considerando m = n: ℛH(Δf) è dunque pari alla trasformata di
Fourier di sequenze (§ 4.3↑)
della dispersione potenza-ritardo Pn
= σ2an
= E{a2n}. La banda di coerenza↓
Bc è quindi
definita come l’intervallo di frequenze Δf
entro cui H(f) si mantiene correlata, e può
essere fatto corrispondere alla larghezza di banda di ℛH(Δf).
Pertanto, quanto più la dispersione temporale Δτ
(o, più in generale, la deviazione στ)
risulta elevata, tanto minore sarà il valore di Bc.
Convenzionalmente, una sua valutazione approssimata ricade
nell’intervallo
Esempio Consideriamo un canale radio in un contesto urbano,
caratterizzato da una deviazione standard dei ritardi στ
= 5 μsec, e per il
quale si assume valida l’approssimazione del profilo di dispersione
potenza-ritardo esponenziale (16.129↑),
ovvero P(τ) =
(1)/(στ)e − τ⁄στ.
L’applicazione della (16.131↑) porta ad una
stima di Bc
compresa tra 4 e 40 KHz.
Svolgimento Dato
che [773] [773]
ℱ{P(τ)}
=
∞⌠⌡ − ∞P(τ)e − j2πfτdτ
= (1)/(στ)∞⌠⌡0e
− (τ)/(στ)e
− j2πfτdτ
= (1)/(στ)∞⌠⌡0e
− ⎛⎝(1)/(στ) + j2πf⎞⎠τdτ
=
=
(1)/(στ)(
− 1)/((1)/(στ) + j2πf)e
− ⎛⎝(1)/(στ) + j2πf⎞⎠τ|∞0
= (1)/(στ)(1)/((1)/(στ) + j2πf) = (1)/(1
+ j2πστf)
ℛH(Δf) = ℱ{P(τ)} = (1)/(1 + j2πστΔf), osserviamo che
questa ha il massimo nell’origine (vedi fig. 4.20↑ a pag. 1↑), ed il
suo modulo si dimezza [774] [774] |ℛH(Δf)| = (1)/(2)
se √(1 + (2πστΔf)2)
= 2, e dunque 2πστΔf
= √(3)
ovvero Δf = (1.73)/(6.28στ) = (1)/(3.63στ) per Δf = (1)/(3.63στ): pertanto la scelta
Bc = 1⁄5στ
= 40 KHz corrisponde ad una correlazione in frequenza
maggiore di 0.5. Lo stesso calcolo mostra che scegliere invece la
stima più restrittiva Bc
= 1⁄50στ
= 4 KHz corrisponde ad una correlazione |ℛH(Δf)| >
0.9 (per l’esattezza, si ottiene |ℛH(Δf
= 1⁄50στ)| = 0.94).
Ricapitolando, se la banda W
del segnale modulato non eccede Bc
ci si trova nelle condizioni di fading piatto, mentre se W > Bc le
componenti spettrali di x(t) subiscono alterazioni
statisticamente indipendenti, i cammini multipli↓
causano un effetto filtrante, si manifesta isi,
ed il canale corrispondente viene detto selettivo in frequenza.
Approssimando l’occupazione di banda di un segnale numerico modulato
come il reciproco del periodo di simbolo W≃(1)/(Ts), osserviamo che la
condizione di fading piatto W < Bc
implica che Ts≃(1)/(W)
> (1)/(Bc) > στ,
ovvero la deviazione standard dei ritardi è inferiore al periodo di
simbolo, limitando gli effetti dell’isi.
Dato che la correzione degli effetti di
distorsione lineare e isi richiede al
ricevitore complesse operazioni di equalizzazione (§ 15.4↑), si tenta di
operare per quanto possibile in condizioni di fading piatto, occupare
una banda W < Bc,
e limitare di conseguenza la velocità di segnalazione fs.
Un possibile escamotage può essere l’adozione di una
trasmissione ofdm, che suddivide W in tante sotto-bande più piccole, e
adotta un Ts > στ.
Mentre nel caso di trasmissione dsss,
anche se viene occupata una banda W > Bc,
al § 16.3.4.10↓
si mostra come non sia necessaria equalizzazione.
Per celle molto grandi la differenza di percorso
tra cammini multipli può essere notevole (vedi § 16.5.2↓),
determinando una Bc
ridotta, e quindi una bassa velocità di trasmissione. Riducendo la
dimensione di cella è possibile aumentare la velocità, dato che le
differenze di ritardo si riducono. Pertanto, se celle con raggio di
chilometri e △τ > 10 μsec
possono richiedere equalizzazione anche per trasmissioni a 64 kbps, al
contrario comunicazioni indoor con △τ
< 1 μsec possono
presentare flat fading per velocità dell’ordine del Mbps. Celle
di dimensione minima, dette anche picocelle, presentano una
dispersione temporale di solo qualche decina di picosecondi, permettendo
di operare a molti Mbps anche senza equalizzazione.
16.3.4.6 Dispersione spettrale e variabilità temporale↓
Finché
il ricevitore e gli oggetti riflettenti sono fermi, la distribuzione dei
ritardi τn non
varia nel tempo, e la componente di attenuazione supplementare su
piccola scala mantiene uno stesso (casuale) valore, sia esso di Rayleigh
o di Rice; in tal caso il fading non è né lento né veloce, ma costante.
Viceversa, nel caso in cui ci sia movimento [775] [775] Del
ricevitore, del trasmettitore, o degli oggetti riflettenti.
l’inviluppo complesso ricevuto (16.118↑)
si riscrive come
y(t) = N⎲⎳n
= 1an(t)x(t
− τn(t))e
− j2πf0τn(t)
evidenziando come ora sia le ampiezze an
che i ritardi τn
dipendono dal tempo. Allo scopo di analizzare le conseguenze di questa
non stazionarietà, consideriamo una portante non modulata x(t)
= cos2πf0t, con inviluppo
complesso x(t) = 1 [776] [776] Come
evidente dalla eq. (11.2↑)
a pag. 1↑,
che produce la ricezione di
Si ottengono quindi N diversi
segnali modulati sia in ampiezza che angolarmente, anche se è
stata trasmessa una sola frequenza. In generale le ampiezze an(t)
non variano di molto con il movimento, mentre come già osservato, sono
sufficienti piccole variazioni di τn(t)
per causarne di grandi per αn(t) = 2πf0τn(t):
ad esempio, con una f0 = 1
GHz, basta una variazione di τ
pari ad 1 nsec per produrre una rotazione di 2π.
Riprendiamo i dati ed il
modello usati a pag. 1↑
per ottenere il risultato in figura,
 relativo ad un mobile che
viaggia a 50 Km/h, e che in 100 sec percorre 1.4 Km a partire da una
distanza di 1 Km dal trasmettitore, in presenza di una superficie
riflettente posta a 100 metri da metà percorso. Il ritardo del
cammino riflesso varia da 66 a 27 nsec, con la legge mostrata in
figura, dovuta al variare nel tempo dell’angolo di riflessione.
relativo ad un mobile che
viaggia a 50 Km/h, e che in 100 sec percorre 1.4 Km a partire da una
distanza di 1 Km dal trasmettitore, in presenza di una superficie
riflettente posta a 100 metri da metà percorso. Il ritardo del
cammino riflesso varia da 66 a 27 nsec, con la legge mostrata in
figura, dovuta al variare nel tempo dell’angolo di riflessione.
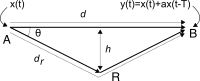
La figura a lato rappresenta
 un mobile che
viaggia a velocità costante v, ed
impiega Δt = d⁄v
secondi per spostarsi tra i punti X
ed Y distanti d,
mentre riceve una portante a frequenza f0
= c⁄λ dalla sorgente S. La differenza di distanza Δl
dalla sorgente nei due
punti risulta [777] [777] Approssimiamo
θ come uguale in X
e Y, nell’ipotesi che S
sia molto lontana rispetto a d.
un mobile che
viaggia a velocità costante v, ed
impiega Δt = d⁄v
secondi per spostarsi tra i punti X
ed Y distanti d,
mentre riceve una portante a frequenza f0
= c⁄λ dalla sorgente S. La differenza di distanza Δl
dalla sorgente nei due
punti risulta [777] [777] Approssimiamo
θ come uguale in X
e Y, nell’ipotesi che S
sia molto lontana rispetto a d.
e quindi la differenza di fase nel segnale
ricevuto in X e Y
vale [778] [778] Il
rapporto n = △l⁄λ
indica quanti periodi di portante entrano in △l,
che moltiplicato per 2π
fornisce appunto la differenza tra le fasi di arrivo, nulla se n è intero.
Pertanto, durante il tragitto la frequenza
ricevuta differisce da f0
per una quantità [779] [779] Vedi
eq. (11.27↑)
a pag. 1↑.
fd = (1)/(2π)(Δα)/(Δt) = (v)/(λ)cosθ
= (c)/(c)(v)/(λ)cosθ
= f0(v)/(c)cosθ
denominata scostamento Doppler [780] [780] Si
tratta dello stesso effetto che produce la variazione del suono
della sirena di un mezzo di soccorso, vedi http://it.wikipedia.org/wiki/Effetto_Doppler.
Considerando ora al posto della singola sorgente S
tutti gli N riflettori che danno
origine al multipath, l’effetto Doppler si verifica per ciascuno di
essi, producendo la ricezione di frequenze fn
= f0±fnd, aumentate (o
diminuite) rispetto alla portante f0
della frequenza Doppler↓
in cui θn è
l’angolo tra la direzione del moto e la congiungente con il riflettore [781] [781] La stessa analisi è valida
anche nel caso di un ricevitore fermo ma con i riflettori in
movimento, come per la la riflessione ionosferica: in tal
caso l’espressione si scrive come fnd
= f0(vn)/(c)cosθn,
considerando cioè la possibilità che i riflettori abbiano velocità
diverse tra loro.. Con i dati dell’esempio precedente
(relativo ad un moto con v = 50
Km/h ovvero 13.8 m/sec), ponendo f0
= 1 GHz si ottiene una fnd
massima di 46.3 Hz, relativa al caso di θn
= 0 [782] [782] Notiamo
che se θn = 0
ci stiamo riferendo al caso in cui il moto si realizza lungo la
congiungente tra ricevitore e sorgente (o riflettore).;
indichiamo con fD = max n{fnd} = f0(v)/(c) tale valore. Dispersione
Doppler↓
Dato che ogni diverso percorso è caratterizzato da una fnd
compresa tra zero e fD,
il segnale ricevuto contiene frequenze che si discostano da f0
in più o in meno, entro una deviazione massima pari ad fD,
per questo indicata come dispersione (o spread) Doppler,
ed il canale è detto dispersivo in frequenza.
Considerando il mobile raggiunto da infiniti
percorsi con direzione di arrivo distribuita uniformemente (condizione
di scattering isotropo), si può arrivare a mostrare [783] [783] Notiamo
che il risultato è diretta conseguenza della condizione di
scattering isotropo: infatti la (16.133↑)
rappresenta un processo armonico (pag. 1↑)
quando − π < θn
< π con d.d.p. uniforme, ed al tempo stesso
rappresenta la deviazione della frequenza istantanea fi
rispetto ad f0 (§ 9.2.2↑),
e dunque si verifica l’effetto di conversione am-fm
descritto al § 10.3.3↑.
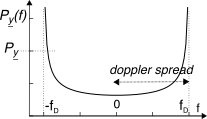
Se
 viceversa ad es. esistono due soli cammini, il primo diretto (S), e
l’altro riflesso (R) con il mobile nel mezzo, Py(f)
corrisponde a due impulsi in ±fD.
che la densità spettrale ricevuta assume una espressione del tipo
mostrata sotto, e del tutto simile a quella di pag. 1↑. La dispersione
Doppler fD
viceversa ad es. esistono due soli cammini, il primo diretto (S), e
l’altro riflesso (R) con il mobile nel mezzo, Py(f)
corrisponde a due impulsi in ±fD.
che la densità spettrale ricevuta assume una espressione del tipo
mostrata sotto, e del tutto simile a quella di pag. 1↑. La dispersione
Doppler fD
 costituisce nella pratica una misura della velocità di variazione
del canale [784] [784] In
questo modo si ottiene una trattazione unificata sia per il caso di
un ricevitore mobile in un contesto statico, sia per quello di un
ricevitore fermo con riflettori in movimento. In entrambi i casi il
doppler spread fD
può essere effettivamente misurato al ricevitore, in
presenza di una portante non modulata., come già
evidenziato in relazione alla frequenza degli affievolimenti di cui
all’eq. (16.124↑).
costituisce nella pratica una misura della velocità di variazione
del canale [784] [784] In
questo modo si ottiene una trattazione unificata sia per il caso di
un ricevitore mobile in un contesto statico, sia per quello di un
ricevitore fermo con riflettori in movimento. In entrambi i casi il
doppler spread fD
può essere effettivamente misurato al ricevitore, in
presenza di una portante non modulata., come già
evidenziato in relazione alla frequenza degli affievolimenti di cui
all’eq. (16.124↑).
Consideriamo infatti che l’inviluppo complesso ricevuto y(t)
descritto dalla (16.132↑)
è il risultato della somma vettoriale nel piano complesso dei termini an(t)e − j2πf0τn(t),
che in virtù dei diversi scostamenti Doppler sono ognuno in rotazione [785] [785] Si veda l’interessante
animazione java presso
ad una diversa velocità angolare 2πfnd,
tanto maggiore quanto più è grande fD,
che quindi determina la rapidità con cui il risultato y(t)
varia nel tempo.
Tempo
di coerenza↓
L’antitrasformata di Py(f) è per definizione l’autocorrelazione
di y(t), e per la (16.134↑)
si ottiene ℛyy(τ) = Jo(2πfDτ) in cui J0
è la funzione di Bessel del primo tipo di ordine zero graficata a pag. 1↑, ed il
cui primo passaggio per zero avviene con τ≃(0.4)/(fD), che corrisponde al minimo
intervallo di tempo necessario ad osservare valori di y(t)
incorrelati; viceversa, un intervallo sufficientemente più
piccolo trova il canale in condizioni pressoché immutate. Definendo
allora
Tc = (0.1)/(fD)
come tempo di coerenza, osserviamo che una trasmissione con
periodo di simbolo Ts ≥
Tc subisce condizioni del canale
differenti nell’arco di tempo di un simbolo, ostacolandone la
sincronizzazione [786] [786] Ciò
avviene perché in pratica è come se due simboli consecutivi
pervenissero attraverso due differenti canali, e dunque non è
possibile eseguire operazioni di media., ed in tal
caso il fading viene detto veloce. Se invece Ts≪Tc
il canale si mantiene in condizioni pressoché stazionarie per tutto il
periodo di simbolo, il fading è lento, ed il movimento non
produce conseguenze sensibili. Utilizzando di nuovo i dati dell’ultimo
esempio, ad un doppler spread fD
= 46.3 Hz corrisponde un tempo di coerenza Tc
= 21.6 msec. 16.3.4.7 Tipologia di canale radiomobile↓
Notiamo che il verificarsi contemporaneo della assenza di distorsione
lineare in quanto W < Bc,
e della stazionarietà del canale in quanto Ts
< Tc, ovvero di fading lento
e piatto,
equivale in pratica al verificarsi delle condizioni di
canale perfetto (pag. 1↑).
Perché ciò possa accadere è necessario che si verifichi [787] [787] Infatti
le due condizioni W < Bc
e Ts < Tc
possono essere riscritte come Wστ≪1
e fDTs≪1;
moltiplicandole tra loro si ottiene WστfDTs≪1.
Ponendo quindi W≃(1)/(Ts) si ottiene la
condizione indicata.
⎧⎨⎩
W < Bc = 0.1στ
no
dist lin
Ts < Tc
= 0.1fD
stazionario
Condizioni
di slow flat fading
(16.135)
fD⋅στ≪1 ovvero Tc⋅Bc≫1
detta condizione di sottodispersione (underspread).
Nella pratica, i valori di fD
e στ per i
canali in uso nelle telecomunicazioni soddisfano tale condizione. La
figura 16.37↓-a)
suddivide [788] [788] Il
ramo di iperbole che individua il luogo dei punti W⋅Ts
= cost è tracciato in base all’osservazione della
nota precedente, ossia W≃(1)/(Ts), da cui W⋅Ts≃1.
il piano Ts, W
nelle regioni per le quali si verificano i diversi tipi di fading, in
funzione dai valori Bc
e Tc, mentre la
figura 16.37↓-b)
rappresenta in forma gerarchica i fenomeni di attenuazione supplementare
fin qui discussi.


Esempio Dato un canale con assegnati Tc
e Bc,
determinare la massima velocità per una trasmissione qpsk
con impulso a coseno rialzato e γ = 1,
in modo da evitare l’uso di un equalizzatore. Affrontiamo l’analisi
fissando la banda occupata B = fs(1 + γ)
pari a Bc,
da cui si ottiene una fb
= fs⋅2 = Bc⁄2⋅2 = Bc.
In tal caso Ts = 1⁄fs
= 2⁄Bc,
e se il canale verifica la condizione di sottodispersione (16.135↑), si ottiene
anche Ts < Tc,
ovvero il canale può essere ritenuto stazionario per la durata di un
simbolo.
Come discusso, il fading su piccola scala, pur
se lento, può determinare una attenuazione selettiva in frequenza,
vincolando il segnale trasmesso ad occupare una banda minore della banda
di coerenza, oppure ad adottare tecniche di equalizzazione (§ 15.4.1↑) da parte del
ricevitore. D’altra parte, anche in presenza di fading piatto, con il
movimento l’ampiezza del segnale ricevuto subisce fluttuazioni alla
Rayleigh (fig. 16.27↑),
penalizzando le prestazioni ottenibili, ed imponendo l’adozione di un
margine Mps
(eq. (16.122↑))
che aumenta di molto la potenza che occorre trasmettere. Sviluppiamo di
seguito una discussione su come modificare le formule di calcolo della
probabilità di errore in modo da valutare l’aumento della potenza
necessaria senza dover determinare Mps,
mentre ai § 16.3.4.9↓
e 16.3.4.10↓
illustriamo come trasformare il fenomeno dei cammini multipli in una opportunità
per ridurre la potenza necessaria.
16.3.4.8 Probabilità di errore in presenza di fading di Rayleigh
La variabilità temporale della potenza
istantanea ricevuta ρ2
può essere tenuta direttamente in conto se l’espressione della Pbite(Eb⁄N0)
ottenuta al § 14↑
per un canale gaussiano viene considerata come quella di una probabilità
condizionata Pr⎛⎝err
⁄ (Eb)/(N0)⎞⎠
rispetto ad un determinato valore di Eb⁄N0,
di cui valutare il valore atteso rispetto alla variabilità
statistica dei valori ricevuti di E’b
= ρ2Eb, ovvero
 y = ρ√(Eb⁄N0) ad infinito ottenendo
una funzione di ρ, e quindi
integrare con 0 < ρ < ∞,
ci si muove in orizzontale tra ρ = 0
e ρ = y√(N0⁄Eb) ottenendo una funzione
di y, quindi integrata con 0 < y < ∞. Verifichiamo
quindi che
y = ρ√(Eb⁄N0) ad infinito ottenendo
una funzione di ρ, e quindi
integrare con 0 < ρ < ∞,
ci si muove in orizzontale tra ρ = 0
e ρ = y√(N0⁄Eb) ottenendo una funzione
di y, quindi integrata con 0 < y < ∞. Verifichiamo
quindi che
Pbite = Eρ⎧⎩Pr⎛⎝err
⁄ (ρ2Eb)/(N0)⎞⎠⎫⎭
= ∞⌠⌡0Pr⎛⎝err
⁄ (ρ2Eb)/(N0)⎞⎠p(ρ)dρ
Prendendo come esemplare il caso della modulazione bpsk [789] [789] A causa delle fluttuazioni di
ampiezza legate al fading, non è possibile ricorrere a modulazioni
di tipo qam, e nel seguito sono
prese in considerazione unicamente modulazioni di fase e di
frequenza., partendo dall’eq. (16.22↑)
possiamo scrivere Pr⎛⎝err
⁄ (ρ2Eb)/(N0)⎞⎠ = Pbite⎛⎝(ρ2Eb)/(N0)⎞⎠ = (1)/(2) erfc{ρ√(Eb⁄N0)},
mentre in presenza di fading di Rayleigh la v.a. ρ
ha come noto d.d.p. pP(ρ) = (ρ)/(σ2) e
− (ρ2)/(2σ2) con ρ
> 0; ricordando (§ 5.2.4↑)
l’espressione di erfc{α} = (2)/(√(π))∫∞αe − y2dy
possiamo quindi scrivere
Pbite = (1)/(√(π))∞⌠⌡0∞⌠⌡ρ√(Eb⁄N0)
e − y2dy(ρ)/(σ2) e
− (ρ2)/(2σ2)dρ
ed invertendo l’ordine di integrazione otteniamo [790] [790] Il
dominio di integrazione è rappresentato in figura, e anziché
muoversi prima lungo y dalla
retta
∫y√(N0⁄Eb)0(ρ)/(σ2) e
− (ρ2)/(2σ2)dρ
= − e
− (ρ2)/(2σ2)|y√(N0⁄Eb)0
= − e − (y2)/(2σ2)(N0)/(Eb) + 1.
(16.136)
Pbite = (1)/(√(π))∞⌠⌡0
e − y2y√(N0⁄Eb)⌠⌡0(ρ)/(σ2) e
− (ρ2)/(2σ2)dρdy
= (1)/(√(π))∞⌠⌡0 e − y2[1
− e − (N0)/(Eb)(y2)/(2σ2)]dy
Notando ora che E{ρ2Eb} = Eb’
= 2σ2Eb, indichiamo
con Γ = (2σ2Eb)/(N0) = (Eb’)/(N0) l’SNR
per bit medio che viene ricevuto, e dopo alcuni passaggi [791] [791] Con
l’ultima posizione la (16.136↑)
si riscrive come Pbite
= (1)/(√(π))∫∞0 e − y2dy
− (1)/(√(π))∫∞0 e − y2 − (y2)/(Γ)dy.
Tenendo conto che ∫∞ − ∞e
− y2dy = √(π)
(vedi https://it.wikipedia.org/wiki/Integrale_di_Gauss) il primo termine risulta pari ad (1)/(2), mentre dato che − y2 − (y2)/(Γ) = − (Γ + 1)/(Γ)y2 e
che risulta anche ∫∞ − ∞e
− αy2dy = √(π⁄α),
il secondo termine si riscrive come (1)/(√(π))∫∞0 e − (Γ + 1)/(Γ)y2dy
= (1)/(2)√((Γ)/(1 +
Γ)), da cui il risultato.,
si ottiene il risultato in forma chiusa
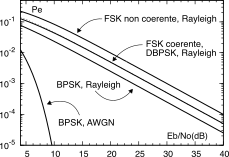
PRayleighe(bit) = (1)/(2)(1 − √((Γ)/(1 + Γ)))
che confrontato con l’espressione di PBPSKe(bit)
per un canale agwn evidenzia come in
presenza di fading di Rayleigh la Pe
è sensibilmente peggiore, e diminuisce molto più lentamente
all’aumentare di Eb⁄N0,
come può essere apprezzato dalla figura 16.39↓.
Procedendo in modo simile si possono valutare le
prestazioni per le altre forme di modulazione riportate nella tabella di
fig. 16.39↑,
assieme al rispettivo valore approssimato di Pbite
per grandi valori di Γ.
Esempio Determinare l’incremento di potenza necessario a
conseguire una Pbite
= 10 − 4 nel caso di una modulazione bpsk
affetta da fading di Rayleigh, rispetto alla potenza necessaria su
di un canale awgn.
Svolgimento Dal
grafico di fig. 16.39↑
osserviamo che nel caso awgn è
necessario un Eb⁄N0
circa pari a 8 dB, mentre in presenza di fading ne occorrono
circa 34, dunque l’incremento di potenza assomma a 26 dB.
16.3.4.9 Ricevitore multi-antenna↓
Continuando a trattare il caso di fading di
Rayleigh piatto, una soluzione semplice e vantaggiosa è quella
di dotare il ricevitore di più di una antenna, in modo da attuare una
tecnica di diversità di spazio↓,
introdotta al § 16.3.3.6↑.
Se la separazione tra le antenne è sufficiente [792] [792] Nel
caso di un telefono cellulare sono presenti numerosi
riflettori nelle vicinanze del ricevitore, producendo fading
incorrelati per distanze di circa mezza lunghezza d’onda. Viceversa
nel caso della base station fissa con cui il cellulare
comunica, i cammini multipli hanno tutti origine nei pressi del
mobile, riducendo la gamma di angoli di incidenza dei raggi
ricevuti, che iniziano ad essere indipendenti per distanze di decine
di lunghezze d’onda, e quindi in tal caso sono necessarie antenne
molto più lontane tra loro., ad ognuna di esse
corrisponde un canale radio statisticamente indipendente da
quello dell’altra, e quindi se per uno di essi si riceve un segnale
affetto da deep fade, l’altro probabilmente ne è esente.
Selezione
di diversità↓
Consideriamo un ricevitore per cui siano
disponibili M canali indipendenti
affetti da fading di Rayleigh, che indichiamo come rami di diversità.
Su ognuno di essi viene ricevuto un segnale con inviluppo complesso
(vedi eq. (16.119↑))
con i = 1, 2, ⋯M, in cui x(t) è l’inviluppo complesso del segnale
modulato con potenza Ebfb,
ρi è una v.a. con
d.d.p. p(ρ) = (ρ)/(σ2) e − (ρ2)/(2σ2)
uguale per tutti i rami e E{ρiρj} = 0 con i
≠ j, e νi(t)
è un processo gaussiano complesso con c.a. di b.f. indipendenti, a media
nulla e spettro di densità di potenza N0.
A ciò corrisponde un Eb⁄N0
medio che indichiamo come Γ = (Eb)/(N0)E{ρ2} = (Eb)/(N0)2σ2
(vedi pag. 1↑),
mentre indichiamo con γi
l’Eb⁄N0 istantaneo
del ramo i, a cui compete una
d.d.p. esponenziale p(γi) = (1)/(Γ) e − γi⁄Γ con γi
≥ 0 (vedi eq. (16.121↑)).
Pertanto, la probabilità che un singolo ramo abbia un γi
inferiore ad una soglia δ risulta
(vedi eq. (19.3↓)
pag. 1↓)
Pr{γi
≤ δ} = δ⌠⌡0p(γi)dγi = 1 − ∞⌠⌡δ(1)/(Γ) e
− γi⁄Γdγi
= 1 − e − δ⁄Γ
mentre la probabilità che tutti gli M
rami indipendenti presentino contemporaneamente Eb⁄N0 < δ
vale Pr{γ1,
γ2, ⋯, γM ≤ δ} = (1 − e
− δ⁄Γ)M
che indichiamo come PM(δ),
e quindi la probabilità che almeno uno dei rami consegua Eb⁄N0i
= γi ≥ δ risulta
Pr{γi
≥ δ} = 1 − PM(δ) = 1 −
(1 − e − δ⁄Γ)M
Esempio Consideriamo un ricevitore con quattro rami di
diversità, ognuno affetto da fading di Rayleigh, e con un Eb⁄N0 medio Γ
= 20 dB. Determinare la probabilità che l’Eb⁄N0
istantaneo γi
di tutti i rami sia contemporaneamente inferiore ad un valore δ
tale che (δ)/(Γ)||dB
= -10 dB, e confrontare il risultato con il caso di un
ricevitore senza diversità.
Svolgimento Risulta
che Pr{γ1,
γ2, γ3, γ4
≤ δ} = P4(δ)
= (1 − e
− 0.1)4
= 8.2⋅10 − 5, mentre Pr{γi ≥ δ} = P1(δ) = 1 − e
− 0.1 = 9.5⋅10 − 2: pertanto l’uso
di quattro rami di diversità corrisponde ad un miglioramento di
più di mille volte!
L’approccio della selezione di diversità
è facilmente realizzabile in quanto coinvolge solamente il ricevitore,
dove viene comparata la potenza del segnale in arrivo sulle diverse
antenne, e quindi il più forte è inviato al ricevitore. Dato che il
livello di potenza si basa su stime che richiedono una media temporale,
la decisione non avviene in modo prettamente istantaneo; d’altra parte,
è sufficiente che avvenga con tempi inferiori dell’inverso della
frequenza di fading.
Ma si può fare di meglio, se vengono utilizzati tutti
i rami in contemporanea, anziché uno solamente.
Nell’ipotesi più generale che il segnale
ricevuto (16.137↑)
sui diversi rami sia soggetto a fading di diversa intensità, e dunque
con Eb⁄N0 medio
Γi = (Eb)/(N0)E{ρ2i} = (Eb)/(N0)R2i
in condizioni di slow fading il ricevitore può essere in grado
di stimare sia le fasi θi
con cui il segnale si presenta sui diversi rami, sia i valori Ri
del corrispondente guadagno medio di ampiezza. Pertanto, il ricevitore
può annullare i termini di fase mediante il prodotto di ri(t)
per e − jθi,
e procedere ad una operazione di somma (pesata) coerente, dando
luogo ad una grandezza di decisione in corrispondenza degli istanti di
simbolo pari a
dove i coefficienti Gi
rappresentano il diverso peso da attribuire ai rami, da scegliere in
modo da massimizzare Eb⁄N0.
Alla componente di segnale corrisponde dunque una energia media Eb(∑Mi
= 1GiRi)2, mentre per quella di
rumore si ottiene N0∑Mi = 1G2i,
dato che i campioni di rumore sono statisticamente indipendenti:
pertanto l’Eb⁄N0
medio della somma (16.138↑)
risulta pari a
Indicando ora con G = (G1,
⋯GM) il
vettore dei coefficienti della combinazione e con R
= (R1, ⋯, RM) quello dei guadagni di ampiezza medi
dei rami, osserviamo che scegliendo un vettore cG
il risultato non cambia, e dunque limitiamoci a cercare vettori con
modulo unitario ovvero |G|2 = ∑Mi
= 1G2i = 1, in modo da
esprimere la (16.139↑)
come Γ = (Eb)/(N0)| G⋅R|2.
Dato che il prodotto scalare è massimo quando i vettori sono paralleli,
si ottiene che Γ è massimizzato
scegliendo G
= GMR = R⁄|R|
in modo che risulti a modulo unitario, e che il segnale dei diversi rami
sia pesato proporzionalmente al corrispondente guadagno medio Ri.
Tale strategia è indicata come maximum ratio combining, e
corrisponde ad un Eb⁄N0
medio della (16.138↑)
pari a [793] [793] Infatti
|R|2
= ∑R2i,
e con G = GMR
la (16.139↑)
diviene Γ = (Eb)/(N0)⋅((∑R2i)2)/(∑R2i) = (Eb)/(N0)∑R2i
ΓMR = (Eb)/(N0)|
R|2 = (Eb)/(N0)M⎲⎳i
= 1R2i = M⎲⎳i = 1Γi
ovvero pari alla somma degli Eb⁄N0
medi dei singoli rami, che quindi può conseguire valori accettabili
anche se nessuno dei rami lo ottiene individualmente. Nell’ipotesi in cui i diversi rami siano
soggetti ad un fading di intensità comparabile e dunque Ri
= R, i pesi Gi
della combinazione possono essere posti uguali tra loro e pari a
Gi = 1⁄√(M),
permettendo una notevole semplificazione del ricevitore [794] [794] Fermo
restando la necessità di rifasare i rami per ottenere una
somma coerente., e conseguendo un Eb⁄N0
medio
ΓEG = M(Eb)/(N0)R2
ovvero M volte quello di ogni
singolo ramo. D’altra parte, anche nel caso di guadagni differenti Ri ≠ Rj,
il metodo equal gain offre comunque risultati solo di poco
inferiori a quelli di massimo rapporto, e comunque migliori del
metodo a selezione. 16.3.4.10 Ricevitore Rake↓
Questo particolare ricevitore trae vantaggio da
una modulazione dsss (§ 14.9.2↑) che occupa una banda
maggiore della banda di coerenza Wp
> Bc, in modo che il canale
presenti una attenuazione selettiva in frequenza, legata alla
ricezione di più repliche del segnale trasmesso a causa del fenomeno dei
cammini multipli. In tal caso un metodo di modulazione tradizionale
richiederebbe un equalizzatore per rimuovere l’isi
prodotta, mentre se le repliche prodotte dal multipath arrivano con
intervalli temporali maggiori del periodo di chip Tp,
le proprietà di bassa autocorrelazione delle sequenze pn
utilizzate nel dsss rendono tali
repliche equivalenti ad una qualsiasi altra interferenza a larga banda,
permettendo di fare a meno di una procedura di equalizzazione [795] [795] Indicando con {bi}
la sequenza informativa e con x̃(t) =
∑ibipn(t
− iTb) l’inviluppo complesso del
segnale dsss trasmesso, ricordando
la (16.126↑)
e trascurando il fattore 1⁄2
della convoluzione tra inviluppi complessi (eq. (11.10↑)), il
segnale ricevuto in presenza di multipath ha espressione
r̃(t) = N
− 1⎲⎳n = 0Znx̃(t − τn) = N
− 1⎲⎳n = 0Zn ⎲⎳ibipn(t
− iTb − τn)
dove i coefficienti Zn
sono i guadagni complessi dovuti ai cammini multipli. La
decodifica del simbolo j − esimo
avviene moltiplicando r̃(t)
per pn(t − jTs
− τ0) (allineata al primo ritardo τ0) ed integrando il
risultato su di un periodo di bit, realizzando così un filtro
adattato alla sequenza pn, ovvero
b̂j
= (1)/(Ts)(j +
1)Ts
+ τ0⌠⌡jTs
+ τ0r̃(t)pn(t
− jTs − τ0)dt
= (1)/(Ts)Ts⌠⌡0N − 1⎲⎳n = 0Znbjpn(α
− τ’n)pn(α)dα
=
= N − 1⎲⎳n = 0Znbj(1)/(Ts)Ts⌠⌡0pn(α
− τ’n)pn(α)dα
= Z0bj + N − 1⎲⎳n = 1ZnbjRPN(τ’n)
in cui al secondo passaggio sopravvive
solo il termine j − esimo
della ∑i
in quanto è l’unico entro gli estremi di integrazione, dopodiché
si pone α = t − jTs
− τ0, e τ’n
= τn − τ0. Il
primo termine del risultato è pari (a meno del coeff. complesso Z0) al simbolo
cercato, mentre il secondo rappresenta il termine di interferenza
intersimbolica legato ai ritardi τ’n,
e che risulta ridotto rispetto al primo termine del rapporto RPN(τ’n)⁄RPN(0).
.
D’altra parte, anche le repliche ritardate trasportano la medesima
informazione, ed il ricevitore rake
(letteralmente, rastrello) le ricombina mediate l’uso di
un banco di correlatori [796] [796] Detti
fingers, ovvero dita (del rastrello)., ognuno
dei quali utilizza una pn con un
ritardo pari a quello di uno degli echi del multipath, realizzando uno
schema di ricezione a diversità di tempo. Le uscite dei
correlatori sono quindi combinate tra loro con il duplice intento di
rendere la somma coerente eliminando il contributo di fase
dovuto al multipath, e di applicare il principio di massimo rapporto
per trarre massimo vantaggio dallo schema a diversità. Come mostrato in
fig. 16.40↑,
ciò avviene moltiplicando l’uscita del correlatore n
− esimo per Z*n,
e dato che l’uscita stessa (vedi nota 16.3.4.10↑)
contiene il fattore Zn,
tale operazione elimina il contributo di fase, e pesa il
contributo del ramo con Z2n,
ovvero con l’energia associata al ritardo τn [797] [797] Ciò riduce il peso dei
contributi relativi a rami su cui perviene un segnale di ampiezza
ridotta, la cui uscita dipende in misura maggiore dal rumore..
Tali pesi sono infine scalati di una quantità α
= (1)/(∑N
− 1n = 0Z2n) in modo da mantenere la
dinamica del risultato entro valori noti.
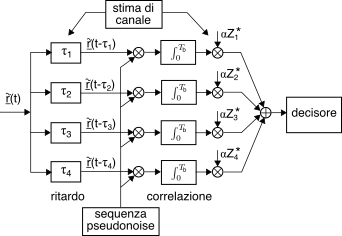
Prec Sezione 16.2: Collegamenti in
cavo Su
Capitolo 16: Collegamenti e mezzi trasmissivi Sezione
16.4: Collegamenti in fibra ottica Segue
 Nato più di 20 anni fa, un progetto di
Nato più di 20 anni fa, un progetto di