Nel ripercorrere le tappe storiche riguardanti la nascita e l’evoluzione dei sistemi di comunicazione ottica, è stato appurato come la rivelazione coerente, l’introduzione del DSP integrato al ricevitore e la necessità di inziare a trattare schemi di modulazione certamente più evoluti rispetto a quello OOK (standard nei sistemi IMDD fino alla metà degli anni 2000) per poter garantire maggiori velocità di tramissione ed efficienze spettrali, siano divenuti elementi imprescindibili nei moderni sistemi di telecomunicazioni. Oggigiorno, infatti, formati digitali di modulazione in fase e ampiezza sono quelli maggiormente utilizzati nei moderni sistemi di comunicazione in ottica coerente, specialmente gli schemi QAM multilivello.
Sulla base di questa premessa e ben consci del fatto che un unico articolo non potrà mai sostituire in esaustività e livello di dettaglio un intero corso di Trasmissione Dei Segnali in tal senso, questa sezione vuole richiamare, in modo necessariamente sintetico, alcuni concetti di teoria della modulazione numerica strettamente necessari alla comprensione di quanto verrà esposto nel prosieguo di questo percorso divulgativo.
Trasmissione da banda passante a banda base
In un classico corso di trasmissione numerica, generalmente il primo passo consiste nel capire come rappresentare matematicamente i segnali nelle diverse parti del sistema di comunicazione.
Nel caso in esame in cui il mezzo trasmissivo è costituito da una fibra ottica, il segnale ottico portante è modellato con una forma d’onda di tipo sinusoidale le cui intensità e fase sono modificate opportunamente per mappare le informazioni da trasmettere: si tratta del noto processo di modulazione. Il segnale modulato può essere rappresentato come
x(t)=\sqrt{2}A(t)\text{cos}\left[ 2\pi f_{c}t+\phi (t) \right]\,\,\,\,\,\,\,\,\,\,[1],dove f_{c} è la frequenza della portante, A(t) e \phi (t) sono l’ampiezza e la fase del segnale modulato nelle cui rispettive variazioni temporali sono codificate le informazioni impresse dal segnale modulante; la formulazione [1] è indicata come rappresentazione in banda passante (o banda traslata o passa banda) del segnale x(t). Un’espressione alternativa della [1] è
x(t)=\sqrt{2}x_{I}(t)\text{cos}(2\pi f_{c}t)-\sqrt{2}x_{Q}(t)\text{sin}(2\pi f_{c}t)\,\,\,\,\,\,\,\,\,\,[2],
dove x_{I}(t)=A(t)\text{cos}[\phi(t)] e x_{Q}(t)=A(t)\text{sin}[\phi(t)] sono denominate componenti in fase (I) e in quadratura (Q) di x(t); in tale formulazione, si assume che f_{c}>W/2, dove W è il supporto spettrale dei segnali x_{I}(t) e x_{Q}(t).
E’ possibile adottare un’ulteriore rappresentazione del segnale da trasmettere che, ricorrendo al formalismo matematico dei numeri complessi, elimina la dipendenza dalla frequenza portante: si tratta della rappresentazione equivalente in banda base di x(t), noto anche come inviluppo complesso di x(t), la cui espressione è
x_{b}(t)=x_{I}(t)+ix_{Q}(t)\,\,\,\,\,\,\,\,\,\,[3];si noti che x(t) è riottenibile da x_{b}(t) dalla seguente
x(t)=2 \mathfrak{R} \left\{ x_{b}(t)e^{i2\pi f_{c}t} \right\}\,\,\,\,\,\,\,\,\,\,[4].Gli spettri di x(t) e x_{b}(t) sono schematizzati in Fig.1.

Fig.1 – Spettri d’ampiezza di un segnale x(t) in banda passante e dell’equivalente x_{b}(t) in banda base.
Quanto finora descritto è sviluppato approfonditamente qui; ciò che bisogna ricordare è che, trattando le tecniche di trasmissione, è possibile effettuare uno studio unico valido sia per le trasmissioni in banda base che in banda traslata. Presupponendo infatti che:
- La funzione di trasferimento (f.d.t.) del mezzo fisico con risposta di tipo passa banda sia simmetrica rispetto alla frequenza portante f_{c};
- Il modulatore e il demodulatore siano perfettamente complementari;
- L’intero sistema di comunicazione in banda traslata sia lineare,
si può osservare che la distorsione subita dal segnale utile demodulato numericamente in ampiezza, ASK (Amplitude Shift Keying), e/o fase, PSK (Phase Shift Keying), è la stessa che verrebbe impressa al segnale di ingresso al modulatore da un ipotetico mezzo fisico in banda base avente come f.d.t. la semiparte positiva della f.d.t. del mezzo trasmissivo in banda traslata, ottenuta facendo coincidere, sull’asse delle frequenze, f_{c} con la frequenza nulla (di fatto, una traslazione).
Trasmissione in banda base
Come noto, in termini piuttosto semplificativi, il problema della trasmissione numerica può essere posto nei seguenti termini: dato un mezzo trasmissivo, avente una propria risposta in frequenza di tipo passa basso, disturbato da rumore cui sono associati un certo livello di potenza e una determinata distribuzione spettrale, è richiesto di determinare la più idonea forma degli impulsi che la sorgente deve trasmettere per inviare informazione, nonché la migliore equalizzazione per conseguire la massima velocità di segnalazione con il minimo tasso di errore possibile.
Velocità di segnalazione e di trasmissione
Prima di procedere oltre, al fine di sgombrare subito il campo da qualsiasi fraintendimento, è fondamentale richiamare adesso una serie di definizioni che coinvolgono i significati di bit, simbolo e relative unità di misura dei rispettivi tassi di trasmissione. Anzitutto è utile definire il significato di condizione significativa relativa a un segnale informativo: è uno specifico parametro fisico del segnale stesso, adottato univocamente come rappresentativo dell’informazione che esso trasporta. Esempi di condizioni significative possono essere quindi: una corrente, una tensione o una potenza elettrica, un livello di potenza, una lunghezza d’onda, una frequenza o una fase, ad esempio, di un segnale ottico lanciato in fibra.
La durata di una condizione significativa è esattamente l’intervallo temporale che intercorre tra due istanti significativi consecutivi; il passaggio da una condizione significativa a un’altra costituisce effettivamente una transizione del segnale: l’informazione può essere quindi trasmessa nella durata di una condizione significativa, oppure codificata tramite la presenza o l’assenza di transizioni.
Fatta questa premessa, si può ora definire il simbolo come: condizione significativa del canale di comunicazione che perdura per un intervallo temporale fissato, a cui si associa una certa quantità di informazione.
Si definisce velocità di segnalazione V_{S} (equivalentemente indicata nel proseguo di questa trattazione come velocità di simbolo, baud rate o symbol rate), relativa ad una determinata sorgente di informazioni discrete nel tempo (cioè di tipo impulsivo), il numero di impulsi forniti nell’unità di tempo. L’unità di misura adottata è il baud (da E. Baudot che studiò la telegrafia a divisione di tempo) equivalente a simboli/s.
Si definisce velocità di trasmissione V_{T} (equivalentemente indicata nel proseguo di questa trattazione come velocità dati, bit rate o data rate), sempre relativa ad una sorgente di informazioni discrete nel tempo e nelle ampiezze (cioè di tipo numerico), la quantità di informazioni binarie (bit) che vengono fornite nell’unità di tempo; pertanto, l’unità di misura adottata è il bit/s.
È quindi interessate verificare la relazione fra velocità di segnalazione e velocità di trasmissione relativa ad una sorgente di informazioni numeriche. Nel caso molto semplice di sorgente di informazioni binarie è evidente che le due velocità saranno espresse dallo stesso numero, rispettivamente in baud e bit/s; infatti, ogni impulso è a soli due livelli possibili e quindi comporta una quantità unitaria di informazione. Nel caso invece di informazione numerica multilivello è evidente che la velocità di trasmissione sia maggiore di quella di segnalazione; infatti, la quantità di informazione trasferita ad ogni istante caratteristico è i=\text{log}_{2}m dove m è il numero di livelli di discretizzazione.
Pertanto, la relazione generale fra baud rate e bit rate (cioè tra baud e bit/s), relativamente ad una determinata sorgente di informazioni, è la seguente:
V_{T}=V_{S}\cdot \text{log}_{2}m\,\,\,\,\,\,\,\,\,\,[5].In Fig.2 è mostrato un esempio in merito all’applicazione della [5].

Fig.2 – Esempio comparativo tra velocità di segnalazione (baud rate) e velocità di trasmissione (bit rate): in caso di sorgente binaria (in questo esempio, 2 livelli di tensione), le grandezze coincidono numericamente; in presenza di sorgente multilivello (in questo esempio, 4 livelli di tensione), i due valori differiscono.
Sebbene possa sembrare ovvia o banale, tale precisazione è essenziale in quanto, nel seguito, trattando sistemi di trasmissione impieganti complessi schemi di modulazione multilivello, con trasporto di più bit per singolo simbolo, sarà più pratico talvolta ragionare in termini di velocità di segnalazione piuttosto che in termini di velocità di trasmissione, anche se spesso le due grandezze saranno comunque accostate laddove, lo specifico contesto tecnico, richieda di effettuare delle comparazioni tra le due grandezze.
Formazione degli impulsi di segnalazione
Per affrontare, almeno in modo descrittivo, il problema della trasmissione numerica sopra enunciato, occorre fare alcune premesse necessarie, sintetizzabili sostanzialmente in quanto esposto nelle seguenti due sottosezioni.
Filtro di trasmissione rettangolare
Una sorgente discreta di informazione fornisce, in modo sequenziale, dei simboli a due livelli (come mostrato a sinistra della Fig.2) o multilivello (come mostrato a destra della Fig.2), sotto forma di impulsi cadenzati temporalmente da un orologio (clock) e variabili in ampiezza: per questo motivo la trasmissione numerica in banda base viene altresì a volte definita trasmissione PAM (Pulse Amplitude Modulation).
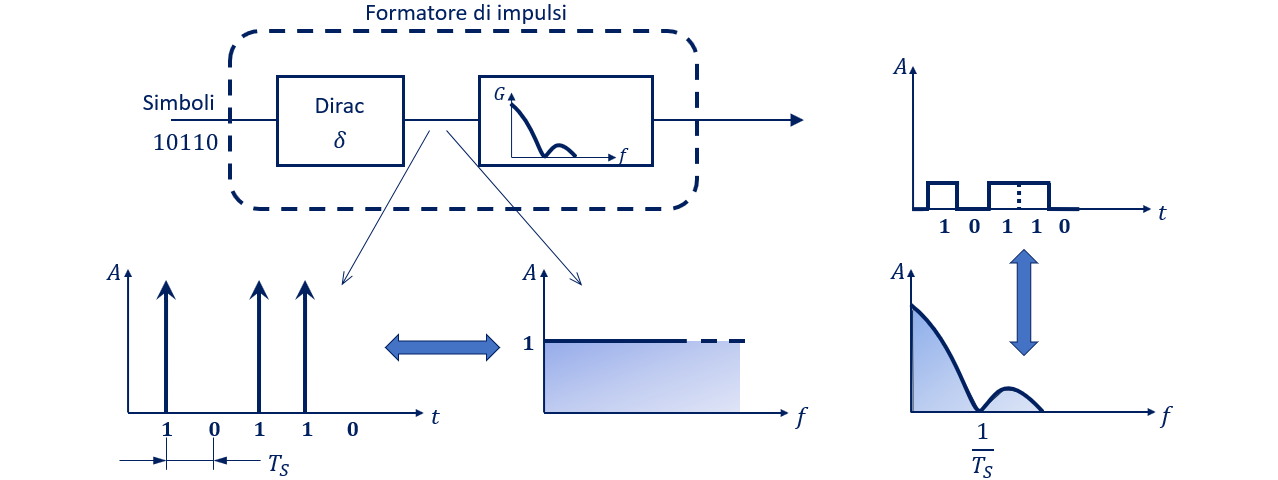
Il formatore di impulsi, in seno alla sorgente trasmittente, si può pensare come un dispositivo che associa ai simboli 1 e 0 (in caso di trasmissione binaria) degli impulsi di particolare forma; per semplificare la trattazione teorica, il formatore di impulsi è modellabile come un filtro particolare sollecitato con un treno di impulsi \delta di Dirac, distanziati di un tempo T_{S}, denominato periodo di simbolo, con il quale si può supporre di rappresentare i simboli dell’informazione (codice) da trasmettere.

Fig.3 – Scomposizione del formatore di impulsi con un filtro di trasmissione e generatore di \delta di Dirac.
Come mostrato in Fig.3, poiché lo spettro di un impulso di Dirac è piatto, è ipotizzabile sostituire il formatore di impulsi con un filtro la cui risposta corrisponde allo spettro dell’impulso da trasmettere; nel caso basilare di simboli 1 e 0 e di impulso presente solo per il simbolo 1, si ha \delta =A per il simbolo 0 e \delta =0 per il simbolo 0. Nel caso di segnale multilivello (per esempio, m=4), si ha \delta _{0}=0, \delta _{1}=A, \delta _{2}=2A, \delta _{3}=3A seguiti da un unico filtro che prende il nome di filtro formatore o, più comunemente, filtro di trasmissione.
Se si sollecita un quadripolo con risposta di tipo passa basso ideale (cioè senza alcuna distorsione di frequenza e fase), con frequenza di taglio pari a B Hz, si ottiene in uscita un impulso come quello mostrato in Fig.4

Fig.4 – Risposta impulsiva di un filtro passa basso rettangolare.
Come si vede, l’impulso di Dirac viene sagomato dal filtro passa basso ideale in un impulso simmetrico con forma d’onda della funzione seno cardinale, ossia \textup{sinc}(t)=\textup{sin}(t)/t; inoltre, la durata stessa dell’impulso e la frequenza delle oscillazioni smorzate dipendono unicamente dalla larghezza di banda B del filtro secondo la relazione T_{S}=1/(2B).
Filtro di trasmissione a coseno rialzato
Dalle considerazioni fatte nella sottosezione precedente derivano alcuni “corollari”; in particolare, se la funzione di trasferimento del filtro di trasmissione è del tipo a coseno rialzato (raised cosine, RC) piuttosto che rettangolare, come illustrato in Fig.5, allora la forma d’onda dell’impulso in uscita da quest’ultimo si modifica assumendo oscillazioni meno pronunciate, ma sempre distanziate di 1/(2B) secondi. Rimane sempre necessaria la condizione per cui non vi sia distorsione di fase da parte del filtro.

Fig.5 – Risposta impulsiva di un filtro a coseno rialzato.
La denominazione “coseno rialzato” deriva dalla constatazione che la risposta in frequenza del filtro è ottenibile come risultante C(\omega ) dalla sovrapposizione di una sagoma spettrale rettangolare, con risposta armonica C_{0}(\omega ) e di una caratteristica cosinusoidale con risposta armonica C_{1}(\omega ); quest’ultima può essere più o meno estesa a seconda di un coefficiente chiamato fattore di roll-off (indicato in letteratura con la lettera R, o con il simbolo \beta o \rho), e pari al rapporto tra l’impegno di banda H della caratteristica cosinusoidale e quella del filtro rettangolare B.
Fatte queste due importanti premesse sulla formazione degli impulsi di segnalazione, la cui trattazione rigorosa e approfondita è disponibile qui e qui, l’argomentazione circa il problema della trasmissione numerica sopra enunciato richiederebbe di continuare naturalmente trattando i temi dell’equalizzazione, della probabilità d’errore e della ricezione ottima; a parte che è sempre possibile approfondirli qui, qui e qui, queste tematiche saranno riprese ed esposte opportunamente in successive pubblicazioni che tratteranno, in modo dedicato, il canale di comunicazione e il ricevitore coerente.
Dal momento che la presente discussione è focalizzata sul trasmettitore coerente, per il momento è sufficiente sapere che è possibile intervenire sulla funzione di trasferimento globale del canale di comunicazione intervenendo:
- O sul filtro di trasmissione, cioè in pratica dando un’opportuna forma agli impulsi di segnalazione;
- O sul filtro di ricezione, cioè operando un’idonea equalizzazione.
Scegliere l’opzione 1., significa proprio selezionare le forme d’onda per il canale globale al fine di determinare le migliori condizioni alla trasmissione di sequenze di simboli, alla velocità di segnalazione V_{S}; pertanto, dato il baud rate V_{S}, si tratta di definire:
- La larghezza di banda minima da impiegare;
- La forma del canale nella banda impiegata (intesa come ampiezza e fase).
Nel 1928, H. Nyquist formula alcuni enunciati fondamentali per la risposta ai due quesiti appena elencati; tali enunciati prendono il suo nome avendo egli dato per primo un assetto rigorosamente matematico a tutto il problema della trasmissione in banda base.
Come prima cosa, Nyquist dimostra che non è possibile segnalare su di un canale di banda B ad una velocità V_{S} superiore a 2B. Come corollario se ne deriva che, data una sorgente di informazioni discrete con symbol rate V_{S}, per trasmettere a distanza i suoi simboli è sufficiente un canale di larghezza di banda B=f_{N} Hz, detta frequenza di Nyquist, data da:
B=\frac{V_{S}}{2}\,\,\,\,\,\,\,\,\,\,[6].Poiché tale relazione sia vera, è necessario che il canale di trasmissione (detto anche canale di Nyquist) sia ideale, cioè non introduca alcuna distorsione di fase. Per quanto riguarda le “forme” del canale che soddisfano la [6], Nyquist indica alcuni criteri, noti tradizionalmente appunto come criteri di Nyquist, che adottano differenti modalità con cui effettuare, in ricezione, la decisione sullo stato dei simboli. In base alla modalità adottata per il riconoscimento varia il criterio che la forma d’onda ricevuta (corrispondente alla risposta impulsiva di tutto il canale) deve soddisfare per rendere la decisione insensibile alla presenza di interferenza intersimbolica (Intersymbol Interference, ISI).
Volendo dare brevemente una formulazione analitica a quanto detto, possiamo riprendere la questione considerando l’espressione del segnale modulato nella formulazione [2] e, in particolare, ponendo l’attenzione sulle componenti di segnale tempo-continuo in fase x_{I}(t) e in quadratura x_{Q}(t). Nei sistemi PAM tali segnali possono essere espressi come sommatorie di forme d’onda continue ritardate nel tempo come segue:
x_{I}(t)=\sum_{k}^{}x_{k}^{I}g(t-kT_{S})\,\,\,\,\,\,\,\,\,\,[7], x_{Q}(t)=\sum_{k}^{}x_{k}^{Q}g(t-kT_{S})\,\,\,\,\,\,\,\,\,\,[8],dove T_{S} è il periodo di simbolo introdotto precedentemente; si assume che x_{I}(t) e x_{Q}(t) abbiano la stessa forma dell’impulso di segnalazione g(t) nonché le stesse componenti discrete in fase x_{k}^{I} e in quadratura x_{k}^{Q}. Secondo il formalismo dei criteri di Nyquist, esiste una famiglia di forme impulsive g(t) per cui la trasmissione avviene in assenza di ISI; questa condizione può essere espressa come
\frac{1}{T_{S}}\sum_{k=-\infty }^{\infty }G\left ( f-\frac{k}{T_{S}} \right )=1\,\,\,\,\,\,\,\,\,\,[9],dove G(f) è la trasformata di Fourier di g(t). La [9] stabilisce quindi che una trasmissione esente da ISI è ottenuta se la somma delle versioni traslate in frequenza di G(f) è pari a una costante: gli impulsi che soddisfano tale condizione sono denominati impulsi di Nyquist.
La forma dell’impulso di Nyquist che occupa la minima banda di trasmissione, 1/(2T_{S}), è ottenuta sagomando g(t) secondo la già citata funzione seno cardinale
g(t)=\frac{sin(\pi t/T_{S})}{\pi t/T_{S}}\,\,\,\,\,\,\,\,\,\,[10].Come si evince dalle considerazioni effettuate nelle due sottosezioni precedenti, impulsi basati sulla [10] hanno una durata temporale infinita, il che rende difficile una pratica implementazione; alternativamente, gli impulsi basati sulla sagomatura a coseno rialzato hanno durata e supporto spettrale controllabili dal fattore di roll-off \beta ^{\textup{RC}}, con 0\leq \beta ^{\textup{RC}}\leq 1. Sempre in base al formalismo dei criteri di Nyquist, la risposta in frequenza del filtro di trasmissione con sagomatura RC è data da

mentre la corrispettiva risposta impulsiva assume la seguente espressione:

La funzione di trasferimento H_{\textup{RC}}(f), così come la corrispondente risposta all’impulso, h_{\textup{RC}}(t) sono mostrate in Fig.6.

Fig.6 – Filtro di trasmissione a coseno rialzato per differenti valori del fattore di roll-off: a) risposta in frequenza; b) risposta impulsiva.
I grafici rappresentati in Fig.6 sono ottenuti mediante il seguente codice Python, utilizzando le funzionalità offerte dalle librerie numpy e matplotlib di Python:
Apri per visualizzare il codice del coseno rialzato
import numpy as np
import matplotlib
from matplotlib import pyplot as plt
# Fattore di roll-off (compreso tra 0 e 1)
val_rolloff = np.array([0,0.5,1])
# Definizione base dei tempi e delle frequenze
N = 1000
t = np.linspace(-2.99, 2.99, N)
f = np.linspace(-0.99,0.99,N)
# Preallocazione spazio su base tempi, frequenza e inizializzazione vettori g e G
# (https://www.w3resource.com/numpy/manipulation/tile.php)
# (https://www.w3resource.com/numpy/manipulation/transpose.php)
t_mat = np.tile(t, [val_rolloff.size, 1])
f_mat = np.tile(f, [val_rolloff.size, 1])
g = np.zeros((val_rolloff.size,N))
G = np.zeros((val_rolloff.size,N))
# Calcolo risposta in frequenza e risposta impulsiva
for idx, beta in enumerate(np.nditer(val_rolloff)):
# Dominio della frequenza:
for idx2, frequenza in enumerate(np.nditer(f)):
if np.abs(frequenza) < (1 - beta) / 2:
G[idx, idx2] = 1
elif np.abs(frequenza) < (1 + beta) / 2:
G[idx, idx2] = 0.5 * (1 + np.cos(np.pi / beta * (np.abs(frequenza) - (1 - beta) / 2)))
# Dominio del tempo:
g[idx, :] = np.sinc(t) * np.cos(np.pi * t * beta) / (1 - np.power(2 * beta * t, 2))
# Plotting:
params = {'mathtext.default': 'regular' }
plt.rcParams.update(params)
#Risposta in frequenza
plt.subplot(121)
plt.title('a)')
plt.plot(np.transpose(f_mat), np.transpose(G), alpha=0.7)
plt.ylim(-0.25, 1.1)
plt.xlabel('$fT_{S}$');
plt.ylabel('$H_{RC}(f)$');
plt.grid(visible=True, linestyle='--')
plt.legend(('$β^{RC}=0$', '$β^{RC}=0.5$', '$β^{RC}=1.0$'), loc=8);
#Risposta impulsiva
plt.subplot(122)
plt.title('b)')
plt.plot(np.transpose(t_mat), np.transpose(g), alpha=0.7)
plt.ylim(-0.25, 1.1)
plt.xlabel('$t / T_{S}$');
plt.ylabel('$h_{RC}(t)$');
plt.grid(visible=True, linestyle='--')
plt.legend(('$β^{RC}=0$', '$β^{RC}=0.5$', '$β^{RC}=1.0$'))
plt.show()Per \beta ^{\textup{RC}}=0, si ha la sagoma spettrale rettangolare di Fig.4 e una risposta impulsiva con durata infinita nel tempo. Aumentando \beta ^{\textup{RC}}, la risposta in frequenza si allarga e, dualmente, l’impulso diventa più stretto nel dominio del tempo. Come vedremo, i moderni sistemi di comunicazione ottica coerente possono lavorare con fattori di roll off abbastanza bassi, che vanno da 0,01 a 0,1, implementando un impulso con spettro quasi rettangolare grazie alla potenza elaborativa dei più recenti algoritmi DSP (Digital Signal Processing), integrati nell’unità di elaborazione numerica direttamente al trasmettitore.
Formati di modulazione
Con riferimento alle relazioni [7] e [8], dipendentemente dalla scelta di x_{k}^{I} e x_{k}^{Q} è possibile implementare vari formati di modulazione, rappresentati dalle loro rispettive costellazioni.

Fig.7 – Piani di costellazione delle modulazioni numeriche: a) OOK; b) BPSK; c) QPSK.
Codice python che realizza i grafici OOK, BPSK, QPSK
import numpy as np
import matplotlib.pyplot as plt
num_simboli = 1000
#Costellazione OOK
x_int = np.random.randint(0, 2, num_simboli)
x_gradi = x_int * 360 / 4.0
x_radianti = x_gradi * np.pi / 180.0
x_simboli = np.cos(x_radianti)
#Costellazione BPSK
x_int1 = np.random.randint(0, 2, num_simboli)
x_gradi1 = x_int1 * 360 / 4.0 + 45
x_radianti1 = x_gradi1 * np.pi / 180.0
x_simboli1 = np.cos(x_radianti1)
#Costellazione QPSK
x_int2 = np.random.randint(0, 4, num_simboli)
x_gradi2 = x_int2 * 360 / 4.0 + 45
x_radianti2 = x_gradi2 * np.pi / 180.0
x_simboli2 = np.cos(x_radianti2) + 1j*np.sin(x_radianti2)
fig, axs = plt.subplots(1,3)
axs[0].set_title('a)')
axs[0].set_xlabel('I')
axs[0].set_ylabel('Q')
axs[0].axvline(0, color='k', linewidth=1.0)
axs[0].axhline(0, color='k', linewidth=1.0)
axs[0].plot(np.real(x_simboli), np.imag(x_simboli), '.', markersize=20)
axs[1].set_title('b)')
axs[1].set_xlabel('I')
axs[1].set_ylabel('Q')
axs[1].axvline(0, color='k', linewidth=1.0)
axs[1].axhline(0, color='k', linewidth=1.0)
axs[1].plot(np.real(x_simboli1), np.imag(x_simboli1), '.', markersize=20)
axs[2].set_title('c)')
axs[2].set_xlabel('I')
axs[2].set_ylabel('Q')
axs[2].axvline(0, color='k', linewidth=1.0)
axs[2].axhline(0, color='k', linewidth=1.0)
axs[2].plot(np.real(x_simboli2), np.imag(x_simboli2), '.', markersize=20)
plt.show()In Fig.7a) è rappresentata la costellazione OOK (On-Off Keying) associata al più semplice formato di modulazione numerica d’ampiezza, nonché quello storicamente più utilizzato nei sistemi incoerenti di comunicazione ottica o IMDD (Intensity Modulation and Direct Detection), come argomentato già in questa occasione; lo schema consta di soli due simboli, uno con ampiezza 0 e l’altro con ampiezza A.
Il secondo formato di modulazione numerica più comune è quello BPSK (Binary Phase Shift Keying), la cui costellazione è mostrata in Fig.7b); in questa configurazione, si trasmettono due simboli che risultano. posizionati simmetricamente rispetto l’origine del piano complesso. Si dice che lo schema BPSK sfrutti un solo grado di libertà del piano di costellazione, ossia l’asse reale, poiché si limita a modulare soltanto la componente di segnale in fase x_{I}(t).
Lo schema di modulazione QPSK (Quadrature Phase Shift Keying), come suggerisce il termine “quadrature” nella sigla, sfrutta due gradi di libertà del piano complesso, cioè sia l’asse reale che l’asse immaginario, modulando di fatto sia la componente di segnale in fase x_{I}(t) che quella in quadratura x_{Q}(t); la costellazione, mostrata in Fig.7c), consiste nella somma di due costellazioni BPSK in quadratura. QPSK e BPSK rientrano nella famiglia delle modulazioni numeriche di fase PSK dal momento che il modulo del fasore rappresentativo dell’ampiezza del segnale è mantenuto costante al variare dell’angolo di fase.
Un’altra classe di formati di modulazione estesamente impiegata nei sistemi trasmissivi è la m-QAM (m-ary Quadrature Amplitude Modulation), in cui \sqrt{m} livelli di ampiezza delle componenti in fase e in quadratura sono uniformemente distribuiti e modulati in modo indipendente; m=L^{2}, dove L è una potenza del 2. In Fig.8 sono riportate le costellazioni associate alle modulazioni 16-QAM e 64-QAM.

Fig.8 – Piani di costellazione delle modulazioni numeriche: a) 16-QAM; b) 64-QAM.
Le costellazioni rappresentate in Fig.8 sono ottenute apportando delle leggere modifiche al codice Python pubblicato qui.
Un aspetto fondamentale riguarda la mappatura tra bit di dati e simboli di modulazione (o segnalazione): in particolare, si richiede che su simboli adiacenti, in termini di posizionamento sul piano di costellazione, siano mappate combinazioni numeriche che differiscano tra loro del più basso numero possibile di bit, idealmente un solo bit. In questa maniera, anche se un solo simbolo trasporta i=\text{log}_{2}m bit, la presenza di errori sui simboli si traduce in un solo bit errato; questo approccio utilizza la codifica di Gray, come illustrato in Fig.9.

Fig.9) Mappatura di bit su simbolo di segnalazione utilizzando la codifica di Gray: a) QPSK; b) 16-QAM.
Vi sono diverse metriche per la valutazione delle prestazioni associate a un formato di modulazione piuttosto che a un altro; una di queste è l’efficienza spettrale (Spectral Efficiency, SE). In questa trattazione, la SE è definita come rapporto tra bit rate trasmesso, R_{b}, e il supporto spettrale W, cioé la larghezza di banda richiesta per supportare la velocità di trasmissione R_{b} richiesta,
\textup{SE}=\frac{R_{b}}{W}\,\,\,\,\,\,\,\,\,\,[13].Con riferimento alle relazioni [7] e [8], se è vero, come detto, che dall’opportuna scelta di x_{k}^{I} e x_{k}^{Q} dipende il tipo di modulazione, è altresì vero che il supporto spettrale W del canale di trasmissione dipende direttamente dalla forma dell’impulso di segnalazione g(t).
Quanto finora discusso in merito alle modulazioni numeriche, è estesamente dettagliato qui, qui e qui.
Per essere sicuri di includere tutte le immagini nel PDF, assicurati di aver lentamente scrollato l’intera pagina prima di cliccare il comando
