15.5 Ricevitore ottimo
In questa sezione rimettiamo in discussione i risultati ottenuti ai §§
15.2.2.3 e
15.4.5. Infatti come è stato illustrato al §
7.6 in relazione al
filtro adattato in presenza di rumore bianco, il valore di
SNR al punto di decisione
è massimo se si usa un filtro di ricezione
hR(t) adattato alla forma dell’impulso trasmesso
g(t) = hT(t), ovvero (a meno di traslazioni temporali) per il quale risulti
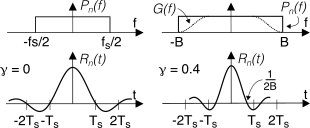
HR(f) = G*(f). Al contrario, nello schema adottato per la figura a pag.
1 il filtro di ricezione ha l’unico scopo di limitare la banda del rumore, ed è sempre un passa-basso ideale, indipendentemente dalla scelta fatta per
g(t). In tal caso, se si adotta una
G(f) di Nyquist
non a banda minima, i campioni di rumore (sovrapposti a quelli di segnale) danno luogo a v.a.
x(kTs) gaussiane ma
non più indipendenti, e quindi la
Pe che si ottiene
non è la minima possibile.
Per rendere incorrelati i campioni di rumore e ridurre la
Pe al minimo, realizzando al contempo le condizioni di Nyquist in ricezione, tentiamo di verificare anche le condizioni
HR(f) = H * T(f) di filtro adattato, decomponendo
il filtro a coseno rialzato
G(f) in parti uguali tra trasmettitore e ricevitore e dando quindi luogo allo schema di figura
15.41, in cui
HT(f) = HR(f) = √G(f)
In tal modo al decisore giunge esattamente lo stesso segnale di prima, mentre la densità di potenza del rumore a valle di
HR(f) non è più costante, ma ora vale
Pertanto i campioni di rumore presi a distanza
Ts sono incorrelati (e quindi statisticamente indipendenti perché gaussiani, vedi §
6.5.1) in quanto
Rν(τ) = F −1{Pν(f)} è ora un impulso di Nyquist, che passa da zero per
τ = kTs. Notiamo che, essendo
G(f) reale pari, la fattorizzazione di
G(f) realizza effettivamente la condizione
HR(f) = H * T(f) che definisce un filtro adattato.
Per ottenere risultati comparabili con quelli ottenuti per
HR(f) = rectfs(1 + γ)(f) consideriamo un filtro a coseno rialzato
G(f) per il quale
max |G(f)| = 1 (anziché
Ts come al §
15.2.2.3), e notiamo che mentre la banda passante di
HR(f) (e dunque del rumore) si è mantenuta pari a
B = fs2 (1 + γ), la potenza del rumore ora vale
riducendosi di un fattore
(1 + γ) se confrontata con (
21.15), e causando un aumento equivalente per l’
SNR; lo stesso fattore
(1 + γ) è quindi rimosso anche nella (
21.21), portando a
il valore della probabilità di errore
sul bit ottenuta adottando il ricevitore ottimo ed il codice di Gray. Dato che al massimo
1 + γ = 2, questo corrisponde ad un
miglioramento massimo di 3 dB nel valore di
Eb⁄N0, permettendo di usare ancora le curve di fig.
15.39. D’altra parte, il fatto che per
γ = 0 la
(21.24) coincida con la
(21.21) non è un risultato inatteso: infatti, se
γ = 0 si attua una trasmissione
a banda minima, e dunque un
HR(f) rettangolare passabasso realizza esattamente un filtro adattato!
Notiamo che l’adozione di un filtro di trasmissione HT(f) = √G(f) comporta che ora nel segnale trasmesso è presente isi, che può essere rimossa solo mediante filtraggio dello stesso attraverso il filtro adattato HR(f) = √G(f).
La figura
15.42 mostra l’andamento di
g√(t) = F − 1{√G(f)} a confronto con una
g(t) a coseno rialzato, per valori di roll-off pari a
0.5 ed
1, ottenuta mediante
ifft della corrispondente risposta in frequenza di modulo unitario nell’origine. Si può notare un aumento sia della durata che dell’ampiezza delle oscillazioni: questa circostanza determina una maggiore complessità realizzativa del filtro di trasmissione, che deve avere una risposta impulsiva più lunga.
15.5.1 Equalizzazione del ricevitore ottimo
Ulteriori considerazioni possono essere svolte qualora il canale trasmissivo presenti una risposta in frequenza
H(f) non ideale, rendendo necessaria l’adozione di un filtro di equalizzazione che in accordo con quanto discusso al §
15.3 può essere semplicemente inglobato in quello di trasmissione, sintetizzando lo stesso come
HT(f) = √G(f)⁄H(f). In tal caso la risposta in frequenza complessiva
HT(f) H(f) HR(f) = G(f) torna ad essere quella di un filtro di Nyquist, il segnale al punto di decisione è esente da
isi, e la densità di potenza del rumore sovrapposto è ancora espressa dalla
(21.22), in modo che i campioni della componente di rumore negli istanti di simbolo sono tuttora incorrelati, e la probabilità di errore
dovrebbe essere la minima possibile.
Tuttavia la presenza del canale distorcente e dell’equalizzatore determinano, a parità di altre condizioni (potenza di segnale, velocità binaria e livello di rumore), un peggioramento della
Pe causato dalla riduzione del rapporto
Eb⁄N0 da utilizzare nella
(21.24) di una quantità
αdB, che al §
15.8.2 è valutata in
Equalizzazione distribuita
Una soluzione alternativa al problema dell’equalizzazione è quella di suddividerne il compito in parti uguali sia al lato di trasmissione che a quello di ricezione, realizzando
HT(f) = HR(f) = √G(f)⁄H(f): anche così la risposta in frequenza complessiva
HT(f)H(f)HR(f) è pari a quella di un filtro a coseno rialzato, ma stavolta il rumore al punto di decisione ha densità spettrale
Pν(f) = N02 |HR(f)|2 = N02 G(f)|H(f)| e dunque i campioni di rumore agli istanti di decisione sono correlati, vedi nota
768. Cionostante, al §
15.8.2.1 si mostra che la scelta di suddividere l’equalizzazione è migliore: in questo caso il peggioramento di
Eb⁄N0 ammonta a
βdB = 20 log10 ⌠⌡B − B G(f)|H(f)| df
e risulta essere
βdb ≤ αdB, con l’uguaglianza solo se
|H(f)| = costante, nel qual caso
αdB = βdb = 0 dB. Per una discussione del risultato, si rimanda al §
15.8.2.1.
Esercizio Una trasmissione numerica binaria antipodale con potenza Px = 1 Volt2 e velocità fb = 10 Mbps adotta un impulso a coseno rialzato con roll-off γ = 1, mentre la densità di potenza del rumore bianco in ingresso al ricevitore è pari a Pn(f) = 0.5 ⋅ 10 − 8. Determinare la probabilità di errore qualora
Equalizzazione al ricevitore
Spesso
non è possibile equalizzare il canale al trasmettitore od in modo ripartito e l’equalizzazione deve essere svolta tutta al lato ricevente imponendo
HT(f) = √G(f) e
HR(f) = √G(f)⁄H(f); si può mostrare che il peggioramento in dB del rapporto
Eb⁄N0 rispetto al caso di assenza di distorsione è dato anche ora dalla
(21.25), mentre il rumore che perviene al decisore ha densità spettrale
Pν(f) = N02 |HR(f)|2 = N02 G(f)|H(f)|2
L’argomento viene ripreso al §
18.4, dove si approfondiscono le tecniche di filtraggio
adattivo che sintetizzano
HR(f) in modo da minimizzare alcune diverse funzioni obbiettivo.
Ora che abbiamo esaurito la discussione su natura e entità degli errori di trasmission, occupiamoci di trattare come questi possano essere mitigati, ovvero come poterci convivere.