16.11 Sincronizzazione
Nelle trasmissioni numeriche occorre ottenere allo stesso tempo sia la sincronizzazione della portante di demodulazione, nei limiti delle ambiguità di fase residue, sia la corretta temporizzazione di simbolo, per campionare le c.a. di b.f. ricevute al centro del periodo di simbolo, ed evitare l’insorgenza di isi. Le due problematiche possono essere affrontate l’una di seguito all’altra, adottando le soluzioni già esposte. D’altra parte sono ora possibili varianti, come ad esempio il Costas loop che, utilizzando entrambe le c.a. di b.f., realizza l’aggancio di frequenza anche per tecniche di modulazione a portante soppressa, oppure procedure che tentano di acquisire per primo il sincronismo di simbolo, e quindi usano i valori delle c.a. di b.f. ricevute per effettuare correzioni alla fase dell’oscillatore di demodulazione.
Qualora la portante di demodulazione presenti una ambiguità di fase residua si può applicare la tecnica della codifica differenziale esposta al §
16.4, oppure inserire una sequenza di simboli noti (o
flag) all’inizio della trama trasmissiva, in modo che il confronto tra i valori previsti e quelli ricevuti permetta di correggere tale ambiguità. Da notare che i
flag o
trailer ad inizio trama possono essere vantaggiosamente usati anche da schemi di recupero del clock del tipo di quelli al §
15.7.2.1.
16.11.1 Sincronizzazione per sistemi a spettro espanso
In questo caso occorre considerare anche la modalità di acquisizione della fase della sequenza pn necessaria al despreading, che avviene in due passi: il primo effettua una ricerca sequenziale ed ha una precisione di metà del periodo di chip Tp, mentre il secondo riduce l’errore mediante una tecnica a controreazione, e lo mantiene sotto controllo.
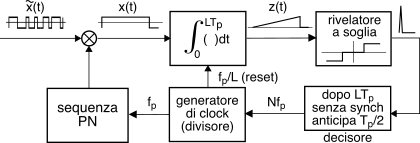
Considerando già avvenuta la sincronizzazione di portante e la demodulazione, il primo passo può essere attuato mediante lo schema in figura detto
sliding correlator, in cui l’integratore (ad es. un integrate and dump) calcola la correlazione tra la
pn in arrivo e quella generata localmente. In caso di coincidenza temporale il risultato
z(t) è una rampa (negativa se il bit fosse stato
− 1), mentre per un ritardo
θ tra la seq. locale e quella ricevuta il risultato dell’integrazione all’istante
LTp è l’autocorrelazione
Rx̃(θ), più termini di rumore a valor atteso nullo. Alla conclusione del periodo di bit
Tb = LTp il generatore di clock resetta l’integratore, non prima però che il rivelatore a soglia abbia prodotto un impulso di sincronismo, inibendo il componente di decisione e terminando la ricerca. In assenza di sincronizzazione, il decisore fa invece avanzare la fase della
pn di
Tp⁄2, tentando di nuovo l’aggancio. Il metodo richiede dunque
2L2Tp secondi (nel caso peggiore), tempo che può essere ridotto eseguendo più ricerche in parallelo.
Dopo aver acquisto la sincronizzazione
lasca il controllo della generazione della
pn passa ad un circuito indicato come
delay locked loop o
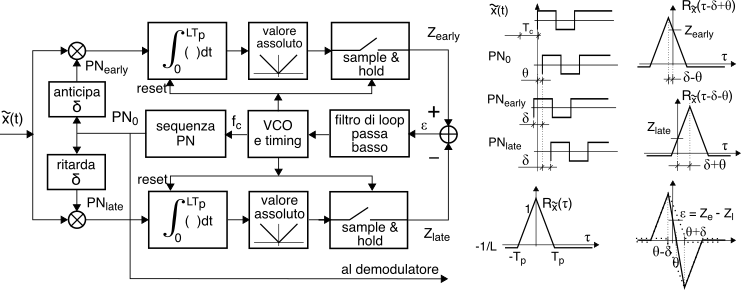
dll, che può essere realizzato in diversi modi, e di cui discutiamo il funzionamento dello schema
canonico mostrato in fig.
16.64.Un generatore pseudonoise produce la sequenza
pn0 affetta dall’errore di temporizzazione residuo
− Tp⁄2 ≤ |θ| ≤ Tp⁄2, che ai fini della discussione assumiamo come un ritardo, e dunque scriviamo
pn0 = x̃(t − θ); lo scopo del
dll è di rendere
θ = 0. Da
pn0 sono derivate due nuove sequenze,
pnearly = x̃(t − θ + δ) e
pnlate = x̃(t − θ − δ), che differiscono da
pn0 rispettivamente per un anticipo od un ritardo
δ < Tp⁄2, e che sono moltiplicate per il segnale allargato di banda base
x̃(t).
L’integratore del ramo superiore (
early) calcola pertanto l’autocorrelazione
Rx̃(δ − θ) = ∫LTp0 x̃(t) x̃(t − θ + δ) dt
tra
x̃(t) e la sua copia
in anticipo di
δ − θ, mentre quello inferiore (
late) calcola
Rx̃(− δ − θ) tra
x̃(t) e la sua copia
in ritardo di
δ + θ (vedi lato destro di fig.
16.64): questi due risultati sono campionati a fine sequenza, ed indicati con
zearly e
zlate; notiamo che se
θ = 0, si ha
zearly = zlate = Rx̃(δ).
Proseguendo con l’esempio, osserviamo come l’evenienza
zearly > zlate indichi che la fase di
pnearly è più prossima a quella del segnale ricevuto di quanto non lo sia quella di
pnlate, e dunque
pn0 è in ritardo, ovvero stiamo andando... troppo piano. In questo caso la differenza
ε = zearly − zlate risulta positiva (vedi costruzione grafica in basso a ds in fig.
16.64), e ciò determina (attraverso il filtro di loop) una
accelerazione del
vco, che tende quindi a ridurre il ritardo iniziale
θ. Se si fosse verificato l’opposto (
θ < 0 e dunque
zearly < zlate) sarebbe risultato
ε < 0, a cui corrisponde un
rallentamento del
vco.
Man mano che
θ si riduce,
pnearly e
pnlate tendono a disporsi simmetricamente in anticipo ed in ritardo di
δ rispetto a
pn0, in modo che
zearly e
zlate prendono il medesimo valore e la loro differenza
ε si annulla, la
fc prodotta dal
vco è costante, e
pn0 è esattamente in fase con
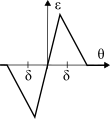
x̃(t). Mentre
θ si azzera, la costruzione grafica in basso a destra di fig.
16.64 transla verso sinistra, in modo che corrisponda
ε = 0 per
θ = 0. Ciò
consente di riformulare l’approccio grafico come nella figura a lato, che rappresenta l’errore
ε in funzione del disallineamento
θ, detta anche
curva di discriminazione o
curva-s, e che evidenzia l’intervallo
|θ| < δ entro il quale il sistema converge. Questa figura è simile a quella discussa al §
12.2.2.2 a proposito del
pll, ed infatti l’analisi delle prestazioni ha molto in comune. In particolare una diminuzione della banda del filtro di loop, se da un lato riduce le capacità di inseguire rapide variazioni di ritardo (come potrebbe essere per effetto doppler), d’altro canto attenua l’influenza del rumore sulla varianza della stima di
θ.
Una alternativa possibile opera direttamente sul segnale modulato, e per questo indicata come dll incoerente, non necessitando della sincronizzazione di portante. Al posto dell’integratore utilizza un filtro passabanda centrato sulla portante, seguito da un demodulatore di inviluppo. Una ulteriore variante, indicata come tau-dither loop, affronta e risolve il problema legato ad un possibile diverso guadagno tra i due rami del dll.