16.6 Demodulazione incoerente
Nel caso in cui la portante di demodulazione non abbia la stessa fase di quella ricevuta, ci si trova nelle condizioni esposte al §
12.2.3.1, ossia il piano dell’inviluppo complesso risulta ruotato, rendendo impraticabili le tecniche di modulazione di fase, a meno di non adottare tecniche differenziali (§
16.4).
In realtà è ancora praticabile la tecnica
ook (
on off keying), ovvero una modulazione
pam della portante con un impulso
nrz polare, oltre a quella dell’
fsk incoerente. Per entrambe si tratta di rivelare la presenza/assenza di una sinusoide nel rumore, per la durata di un bit
Tb o di un simbolo
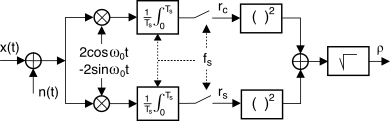
Ts, e si ricorre allo schema di demodulazione discusso
al §
12.2.4 e riportato a fianco, in cui la portante di demodulazione è una di quelle dell’
fsk, oppure l’unica nel caso di
ook, ed il generico passa basso è realizzato come un integratore, ovvero con risposta impulsiva
h(t) = 1Ts rect Ts(t), ovvero ancora come un
filtro adattato all’impulso di trasmissione
g(t) = rectTs(t), in modo da scrivere il segnale ricevuto come
x(t) = ∞⎲⎳k = −∞ak rectTs(t − kTs) cos(ω0t + θ)
in cui
ak = A se la frequenza
f0 è attiva durante il simbolo
k, oppure
ak = 0 nel caso opposto. Il rumore
n(t) in ingresso, con densità di potenza
N02, rende le grandezze di osservazione
rc e
rs due v.a., che nel caso di segnale presente hanno valor medio
mc = Acosθ e
ms = Asinθ, oppure zero per segnale assente, mentre in entrambi i casi e per entrambi i rami la varianza risulta pari a
σ2 = N0⁄Ts.
La decisione se sia presente o meno la frequenza è basata sul
modulo dell’inviluppo complesso
r = rc + jrs, ovvero
ρ = √r2c + r2s, ed attuata mediante l’approccio di massima verosimiglianza esposto al §
14.4.2. Nelle ipotesi poste, il caso in cui
ak = 0 corrisponde ad osservare una v.a. di Rayleigh (pag.
1) con d.d.p.
pP(ρ) = ρσ2 e− ρ22σ2
mentre se
ak = A si osserva una v.a. di Rice, con d.d.p.
pP(ρ) = ρσ2 e− ρ2 + A22σ2 ⋅ I0⎛⎝ρAσ2⎞⎠
ed in questa circostanza si è trovato (eq.
14.108) che se le due ipotesi di segnale presente (
H1) ed assente (
H0) sono equiprobabili e la soglia di decisione è posta pari a
A⁄2, la probabilità di errore può essere approssimata come
Pe = 12 e− A28σ2.
Nel caso dell’
ook osserviamo che
A2⁄2 è la potenza di una sinusoide di ampiezza
A, ma se questa per metà del tempo (gli
ak = 0)
è spenta la potenza si dimezza, e così risulta
Eb = PsTb = A24 Tb; sostituendo dunque
A24 = Eb⁄Tb e
σ2 = N0⁄Tb nell’espressione della
Pe otteniamo
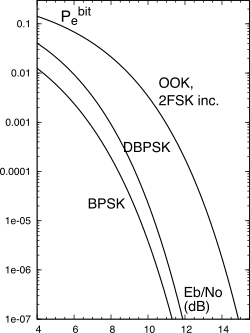
La stessa espressione descrive anche le prestazioni per una modulazione
fsk a due livelli: in tal caso infatti la decisione avviene confrontando due v.a.
ρ1,
ρ2 con distribuzione una di Rice e l’altra di Rayleigh, ottenute duplicando lo schema di fig.
16.33 per le due frequenze (ortogonali) utilizzate, associate ad uno stesso bit uno o zero, e dunque il problema statistico è identico al precedente. La figura
16.34 permette il confronto delle prestazioni tra le tecniche di modulazione binarie presentate.
Nel caso poi di una modulazione
l-fsk incoerente, la decisione avviene scegliendo tra
L v.a.
ρi di cui una distribuita Rice e tutte le altre Rayleigh; lo sviluppo analitico è un po’ più complesso, e fornisce un risultato che seppur peggiore del caso coerente, lo approssima abbastanza bene per
L ed
Eb⁄N0 elevati.