7.6 Filtro adattato
Dopo aver illustrato le trasformazioni subite da un segnale generico che attraversa un filtro generico, affrontiamo lo studio di un caso in cui il filtro viene
progettato per essere al servizio di uno
specifico segnale.
Allo scopo di anticipare
come va a finire, diciamo subito che questa tecnica è un modo per calcolare
l’intercorrelazione Ryg(τ) tra il segnale (rumoroso) in ingresso
y(t) e quello
g(t) che ci aspettiamo di ricevere in assenza di rumore. Tale compito è svolto mediante un filtro detto appunto
adattato a
g(t) e posto all’ingresso ad un
detettore di impulso, ovvero un dispositivo che deve decidere per la presenza o l’assenza di una forma d’onda
nota immersa nel rumore, in modo da rendere minima la probabilità di sbagliare. Un problema simile verrà affrontato al §
14.4.2 in relazione alla detezione
incoerente di sinusoide, mentre ora ci riferiamo ad una
detezione coerente, ovvero in cui il segnale è completamente specificato, compresa la sua temporizzazione o fase.
Indichiamo il segnale trasmesso come
x(t), ottenuto facendo transitare un impulso
δ(t) attraverso un filtro con risposta impulsiva
hT(t) = g(t), con durata limitata
0 < t < T. Viene ricevuto il segnale
y(t), somma di
x(t) (presente o meno) e di un processo gaussiano bianco a media nulla
n(t), indicato come rumore, con densità spettrale
PN(f) = N0 2 .
Un ricevitore basato sul filtro adattato effettua una decisione di
massima verosimiglianza (vedi §
6.6.2.1) a riguardo della presenza (ipotesi
H1) o assenza (ipotesi
H0) del segnale
x(t) in base all’osservazione della grandezza
z(T) ottenuta (vedi figura
7.14) campionando
all’istante
t = T l’uscita
z(t) del filtro di ricezione
HR(f), che opera sul segnale ricevuto
y(t). Il valore osservato per
z(T) è quindi confrontato con
una soglia λ, determinando la decisione per
H1 o
H0 a seconda se
λ sia superata o meno, e commettendo
errore sia nel decidere per
H1 in assenza di segnale, sia decidendo per
H0 in sua presenza .
Legame tra i filtri di trasmissione e ricezione
Alla nota
399 si dimostra che la probabilità di errore del decisore viene resa
minima se
HR(f) è realizzato in modo che risulti
a cui corrisponde una risposta impulsiva
hR(t) esprimibile come
risultato che, nel caso di
g(t) reale come in fig.
7.14, corrisponde ad una
hR(t) ottenuta ribaltando
g(t) rispetto all’asse delle ordinate, e ritardando il risultato di
T, in modo da pervenire ad una
hR(t) causale.
Prima di individuare il valore da utilizzare per la soglia λ, valutiamo le caratteristiche statistiche dei possibili valori per z(T) in uscita da hR(t), che a causa della presenza del rumore, è una realizzazione di variabile aleatoria.
In questo caso (ipotesi
H0) nel segnale ricevuto è presente solo rumore, ovvero
y(t) = n(t), e dunque la grandezza di decisione
z(T) è una v.a. gaussiana il cui valore si calcola come
zH0(T) = ∫∞−∞hR(τ)y(T − τ)dτ = ∫T0g*(T − τ)n(T − τ)dτ = RGN(0)
ossia è pari all’intercorrelazione (eq.
10.156) calcolata nell’origine tra
g(t) ribaltata ed una
finestra di una realizzazione del processo
n(t). Indicando con
mH0z(T) il
valore atteso di
z(T), troviamo che
mH0z(T) = 0, mentre la
varianza di
z(T) vale
σ2z(T) = N0 2 EG, in cui
EG è l’energia dell’impulso
g(t).
Se invece il segnale è presente (ipotesi
H1) allora
y(t) = g(t) + n(t), e si ottiene
zH1(T) = ∫∞−∞hR(τ)y(T − τ)dτ = ∫T0g*(T − τ) [g(T − τ) + n(T − τ)] dτ =
= ∫T0g*(T − τ)g(T − τ)dτ + ∫T0g*(T − τ)n(T − τ)dτ =
= RG(0) + RGN(0) = EG + RGN(0)
producendo ancora una grandezza di decisione z(T) gaussiana, con la stessa σ2z(T) = N0 2 EG (dovuta al rumore) ma con valor medio mH1z(T) = EG ≠ 0, dovuto alla presenza di segnale . Notiamo esplicitamente che mH1z(T) = EG non dipende dalla particolare g(t) adottata, né dalla sua durata T, ma solo dalla sua energia, proprio in virtù dell’aver adottato in ricezione un filtro adattato a quello di trasmissione.
La figura
7.16
mostra l’esito dei nostri calcoli nella forma della d.d.p. della v.a.
z(T) nelle ipotesi
H0 ed
H1, e pertanto il criterio di massima verosimiglianza (vedi §
6.6.2.1) individua come soglia di decisione ottima il valore
λ = EG2, a cui compete una probabilità di errore
Pe minima qualora
Pr(H0) = Pr(H1), ovvero se la probabilità a priori delle due ipotesi è uguale, vedi nota
392.
Mostriamo ora che il risultato ottenuto permette la migliore separazione tra le d.d.p. condizionate alle due ipotesi, nel senso che qualsiasi altra scelta per
HR(f) ≠ G*(f)e −j2πfT con energia
EHR = EG avrebbe prodotto delle d.d.p. più ravvicinate. La separazione tra le gaussiane è legata al rapporto
mH1z(T)⁄σz(T) che viene reso massimo
dalla scelta
(10.172), che porta a
mH1z(T) = EG = max. Il quadrato
(mH1z(T)⁄σz(T))2 del rapporto suddetto viene indicato anche come
rapporto segnale rumore all’istante di decisione, e qualora
HR(f) sia adattato vale
Anticipiamo subito la
(10.174) è valida solo in presenza di rumore bianco, mentre se questo è
colorato, l’
SNR diminuisce, ed il filtro ottimo va determinato nel modo specificato poco più avanti.
Esempio Applichiamo i risultati fin qui ottenuti al caso in cui si utilizzi la
g(t) mostrata a lato, in cui poniamo
A = 2 e
T = 10− 1.
Un decisore a filtro adattato sarà allora caratterizzato dalla risposta impulsiva
hR(t) mostrata a fianco di
g(t). Se campioniamo l’uscita
z(t) di
hR all’istante
t = T, nel caso di
assenza di rumore e
presenza di segnale, si ottiene il valore
mz = z(t)|t = T = g(t) * hR(t)|t = T = ∫T0g(τ)hR(T − τ)dτ
Dato che
hR(T − τ) = g(τ),
come rappresentato nella figura a lato, allora
mz = ∫T0[g(τ)]2dτ = EG, pari a
EG = ∫T0[g(t)]2dt = A2 ∫T0dt = A2T = 4 ⋅ 10− 1.
Il valore di
mz = EG rappresenta il contributo di segnale all’uscita, indipendente dal rumore.
Consideriamo ora in ingresso a
hR anche un processo di rumore gaussiano ergodico bianco, a media nulla, e densità di potenza
Pn(f) = N0 2 = 1 2 10− 1. Il
valore atteso mH1z(T) dell’uscita campionata rimane lo stesso
mz = EG, ma ora ad esso si sovrappone la componente aleatoria dovuta al rumore, anch’essa gaussiana e caratterizzata da una varianza pari a
σ2z = N0 2 EG = N0 2 A2T = 1 2 ⋅ 10− 1 ⋅ 4 ⋅10− 1 = 2 ⋅ 10 − 2
Le d.d.p. condizionate mostrate in fig.
7.16 hanno dunque espressione
p(z ⁄ H0) = 1√ 2π σz e − z2 2σ2z p(z ⁄ H1) = 1√ 2π σz e − (z − mz)22σ2z
in cui
σz = √σ2z = √0.02 = 1.41 ⋅ 10− 1,
mz = EG = 4 ⋅ 10− 1, mentre per la soglia di decisione, si trova il valore
λ = EG⁄2 = 2 ⋅ 10− 1.
Si tratta di una soluzione circuitale in grado di conseguire le prestazioni di detezione del filtro adattato nel caso di un
g(t) = rectT(t), a cui
corrisponde una
hR(t) anch’essa rettangolare. Infatti, il segnale in uscita vale
vo(t) = − 1 RC t⌠⌡0 vi(t)dt + vo(0)
in cui
vo(0) può essere reso nullo e quindi, a parte il segno ed il fattore
1RC, il valore
vo(T) corrisponde a quello che si trova allo stesso istante in uscita da un filtro adattato alla
g(t) rettangolare. L’interruttore che
scarica (dump) la capacità
C per
t = nT ha lo scopo di azzerare la
vo(0) prima della ricezione di un successivo impulso, rendendo possibile l’uso dello schema per la detezione ottima di flussi binari a velocità
fb = 1⁄T.
Nel caso in cui
PN(f) non sia pari ad una costante, la condizione per massimizzare
(10.174) non è più la
(10.172), bensì deve risultare
in modo che
HR(f), oltre ad
esaltare le frequenze per le quali lo spettro del segnale è maggiore, riesce anche ad
attenuare quelle per le quali la potenza di rumore è più grande. Riscrivendo la
(10.175) come
HR(f) = 1√ PN(f) G*(f) √PN(f) e −j2πfT = Hw(f)Ha(f)
si può giungere alla interessante interpretazione illustrata in figura: il segnale ricevuto, in cui è presente sia il segnale
g(t) che il rumore colorato
υ(t), attraversa innanzitutto
un
filtro sbiancante con risposta in frequenza
Hw(f) = 1√ PN(f) e risposta impulsiva
hw(t), così chiamato perché ha lo scopo di rendere il rumore
bianco. Quindi, viene attraversato il filtro adattato all’impulso
sbiancato, ossia alla forma d’onda
gw(t) = g(t) * hw(t) con trasformata
Gw(f) = G(f) √PN(f) , risultato del transito di
g(t) attraverso
Hw(f).
Qualora non sia presente rumore, l’andamento dell’uscita del filtro adattato è proprio pari (a meno del ritardo T) alla funzione di autocorrelazione di g(t), che viene campionata in corrispondenza del suo massimo.
Tornando al caso di rumore bianco, in base al ragionamento esposto alla nota
392 nel caso di equiprobabilità delle due ipotesi
H1 e
H0, la
Pe è pari alla probabilità che una v.a. gaussiana con media nulla e varianza
σ2 = N0 2 EG sia maggiore di
EG2; tale valore può essere calcolato applicando l’eq.
(10.121) a pag.
1, in modo da ottenere
Pe = 1 2 erfc⎧⎨⎩EG⁄2√ 2 √N0 2 EG ⎫⎬⎭ = 1 2 erfc⎧⎨⎩1 2 √ EG N0 ⎫⎬⎭
Esempio con i dati riportati nell’esempio di pag.
1, per la probabilità di errore nel caso di
H0 e
H1 equiprobabili si ottiene
Pe = 1 2 erfc⎧⎨⎩1 2 √ EG N0 ⎫⎬⎭ = 1 2 erfc⎧⎨⎩1 2 √ 4 ⋅ 10− 1 10− 1 ⎫⎬⎭ = 1 2 erfc{1} ≃ 1.5 ⋅ 10− 1
(si utilizzi la fig.
6.9 a pag.
1).
Ma questa non è la minima Pe conseguibile, che si ottiene invece nel caso di segnalazione antipodale, molto più indicata nel caso in cui lo scopo del ricevitore non sia di individuare un solo impulso isolato, ma una sequenza simbolica binaria.
7.6.1 Segnalazione antipodale
Volendo distinguere tra due possibili messaggi (ad es, x1 ed x2), la scelta ottima per rendere minima la probabilità di errore consiste nell’adottare x1(t) = g(t), x2(t) = − x1(t), e di porre in ingresso al ricevitore un filtro adattato a g(t).
In questo modo l’uscita del filtro all’istante di campionamento rappresenta una v.a. gaussiana
z con media
mz = ±EG (a seconda se sia stato trasmesso
x1 o
x2) e varianza
σ2z = N0 2 EG.
Pertanto ora la soglia di decisione è pari a
zero, e nel caso di
simboli equiprobabili, in base alla nota
392, la probabilità di errore
Pe corrisponde a quella di eccedere
EG per una v.a. gaussiana a media nulla: in conseguenza del risultato
(10.121) di pag.
1 si ottiene quindi
che, come vedremo all’eq.
(21.18), rappresentano anche le prestazioni ottenibili per un segnale dati binario a banda minima.
7.6.2 Segnalazione ortogonale
Dovendo trasmettere
N diversi messaggi
(x1, x2, ..., xN), possiamo associare ad ognuno di essi una forma d’onda
xi(t) tale che
∫xi(t)xj(t)dt = 0 con
i ≠ j, ovvero in modo che i segnali
xi(t) siano
ortogonali. In tal caso il ricevitore ottimo è costituito da un
banco di filtri, ognuno adattato ad una diversa
xi(t), in modo che, in assenza di rumore, la ricezione di una delle forme d’onda
xi(t) non produca nessuna uscita sui filtri del banco per
j ≠ i. In presenza di rumore, la decisione su cosa sia stato trasmesso viene presa valutando quale dei filtri presenti il valore massimo in corrispondenza dell’istante di campionamento, realizzando così un
ricevitore a correlazione (vedi §
16.5 a pag.
1).
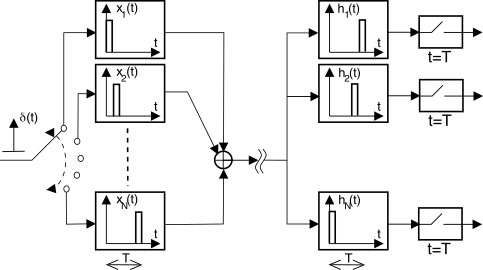
Esempio L’impulso
δ(t) entra in uno di filtri mostrati nella figura
7.20 , le cui risposte impulsive
xi(t) realizzano una famiglia di funzioni ortogonali, dato che le rispettive forme d’onda non si sovrappongono nel tempo. In ricezione, solo uno dei filtri adattati con risposta impulsiva
hi(t) produce una uscita diversa da zero per
t = T, come verificabile ricordando la costruzione grafica dell’operazione di convoluzione mostrata a pag.
1.
Multiplazione a divisione di codice
La trasmissione mediante forme d’onda ortogonali può essere applicata alla tecnica di accesso multiplo a divisione di codice o cdma, qualora ogni utente usi una forma d’onda ortogonale a quella degli altri, ed il ricevitore usi un filtro adattato programmabile in modo da discriminare uno solo tra tutti i codici ricevuti contemporaneamente.
Si tratta di un modo alternativo di realizzare un filtro adattato, derivante dall’osservazione che il suo ruolo essenzialmente si riduce al calcolo della
intercorrelazione (eq.
(10.156)) tra il segnale ricevuto e quello atteso. Tale funzione può essere realizzata anche ricorrendo allo schema in figura, dove un integratore (implementato ad es. mediante il circuito
integrate and dump, pag.
1) opera sul prodotto tra il segnale in arrivo ed una copia locale del coniugato della forma d’onda trasmessa. Un caso di applicazione di questo schema si trova al §
16.5.1 a proposito del ricevitore
fsk ortogonale, mentre una variante idonea a stimare
l’autocorrelazione di
y(t) è proposta al §
7.5.4.