14.3 Prestazioni della modulazione di frequenza
Occupiamoci ora della valutazione dell’
SNR dopo demodulazione per il caso di una trasmissione
fm (§
12.3), analizzando come esso dipenda dalle condizioni di ricezione (potenza ricevuta
Px, densità di potenza del rumore
N0⁄2 e banda del ricevitore
BN) e dai parametri di trasmissione (indice di modulazione
β e banda del segnale modulante
W). Anticipiamo che la natura
non lineare della modulazione
fm porterà a sviluppi del tutto diversi dal caso dell’
am, infatti troveremo che se la potenza del rumore in ingresso al ricevitore non è eccessiva
- quando la potenza del segnale ricevuto Px aumenta, quella del segnale demodulato resta costante, mentre invece diminuisce quella del rumore dopo demodulazione;
- l’SNR dopo demodulazione migliora all’aumentare della banda occupata.
Per arrivare a questi risultati non banali, valutiamo innanzitutto ciò che accade nella ricezione di una portante non modulata, e quindi analizziamo come lo scenario si modifica in presenza di segnale. Infine, illustriamo i motivi che determinano il rapido degrado di prestazioni nel caso di rumore elevato.
14.3.1 Rumore dopo demodulazione FM
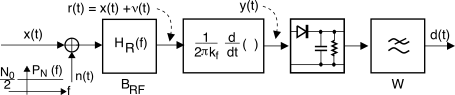
L’analisi viene svolta considerando un demodulatore
a discriminatore (§
12.3.2.2)
alla cui uscita
r(t) del filtro di ricezione è presente una portante
non modulata x(t) di ampiezza
A = √2Px, oltre che un rumore gaussiano bianco limitato in banda
ν(t), ovvero
r(t) = A cosω0t + νc(t) cosω0t − νs(t) sinω0t
La banda del filtro
HR(f) (e dunque di
ν(t)) deve essere sufficiente a far passare le frequenze che
sarebbero presenti se la portate
fosse modulata, e che nel caso
fm può essere stimata applicando la
regola di Carson (eq.
14.56), ossia
BRF = BC ≃ 2W(β + 1).
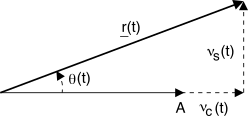
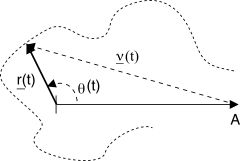
In presenza di una portante non modulata, le componenti analogiche di bassa frequenza dell’inviluppo complesso
r(t) del segnale ricevuto
di cui a fianco è rappresentata la costruzione vettoriale:
rc(t) è la somma tra l’ampiezza
A della portate ed una v.a.
νc(t) gaussiana a media nulla e deviazione standard
σ = √N0BN ≥ √N0BRF , mentre
rs(t) consiste in un’altra v.a.
νs(t) della stessa natura di
νc(t) ma ad essa incorrelata.
Ricordando ora che nel caso
fm il
segnale informativo è legato alla
derivata della fase
θ(t) di
r(t), esprimiamo
r(t) mettendo
θ(t) in evidenza
r(t) = ℜ{r(t)e jω0t} = ℜ{|r(t)|e jθ(t)e jω0t} = |r(t)|cos(ω0t + θ(t))
in cui possiamo considerare il termine
|r(t)| rimosso dal limitatore (vedi §
12.3.2.2) che usualmente è anteposto al discriminatore. Il segnale
y(t) in uscita dal derivatore è quindi descritto (a parte il segno) come
y(t) = 12πkf ddt r(t) ⇒ 12πkf ddt cos(ω0t + θ(t)) = = ⎛⎜⎝f0kf + 12πkf ddtθ(t)⎞⎟⎠ sin(ω0t + θ(t))
e viene a sua volta elaborato da parte del demodulatore di inviluppo come fosse un segnale
bld-pi (§
12.1.1.2), fornendo in definitiva un segnale
demodulato dovuto al solo rumore
14.3.2 Caso di basso rumore
Con riferimento all’ultima figura, osserviamo che qualora
Px = A22 ≫ σ2νc = σ2νs = N0BN i valori di
νc(t) e
νs(t) risultano
piccoli rispetto ad
A, e l’inviluppo complesso ricevuto
r(t) rimane
prossimo a quello della portante non modulata, dato che in questo caso
ν(t) ha modulo
abbastanza più piccolo di
A. L’angolo
θ(t) che compare nella
(14.95) può dunque essere approssimato come
θ(t) = arctan νs(t)A + νc(t) ≃ arctan νs(t)A ≃ νs(t)A
la cui densità spettrale di potenza vale
in quanto
Pνs(f) = N0 come discusso al §
14.1.3. Ricordiamo ora (vedi §
3.6) che l’operazione di derivata svolta dal discriminatore equivale a moltiplicare lo spettro di ampiezza del segnale in ingresso per
j2πf, ovvero moltiplicare la sua densità di potenza per
(2πf)2: applichiamo questo risultato per ottenere la densità di potenza di
νd(t) (14.95) a partire dalla
(14.96), in modo che la densità
di potenza del rumore
demodulato νd(t) risulti
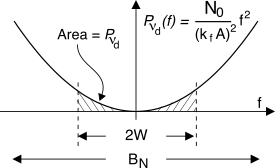
Pνd(f) = 1(2πkf)2 (2πf)2 Pθ(f) = ⎛⎝fkf⎞⎠2 N0A2 = N0(kfA)2 f2
e quindi la relativa potenza totale
Pνd = σ2νd si calcola come
in cui
W è la banda del segnale
modulante (se ci fosse), ed il rumore è limitato in tale banda in virtù del filtro passa basso posto a valle del discriminatore.
Notiamo subito la veridicità della prima affermazione fatta ad inizio sezione: la potenza complessiva del rumore dopo demodulazione fm diminuisce all’aumentare della potenza del segnale ricevuto Px = A22. Una seconda osservazione molto importante è che, per effetto della derivata, la densità di potenza del rumore demodulato ha un andamento parabolico.
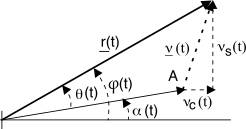
Continuando nell’ipotesi di basso rumore ovvero
Px = A22 ≫ σ2νc = σ2νs = N0BN, possiamo osservare che (vedi fig. a lato) la presenza di una fase
modulante α(t) nel segnale
xFM(t) = Acos(2πf0t + α(t))
comporta che la fase
φ(t) dell’inviluppo complesso del segnale ricevuto
r(t) è costituita dalla somma tra
α(t) e l’angolo
θ(t) dovuto al rumore sovrapposto alla portante di ampiezza
A, cioè
φ(t) = α(t) + θ(t). Pertanto l’uscita
(14.95) del discriminatore diviene
d(t) = 12πkf ddt α(t) + 12πkf ddt θ(t) = sd(t) + νd(t)
ed il rapporto tra le potenze dei due termini definisce l’
SNR dopo demodulazione
come
SNRd = PsdPνd, dove quindi
Psd è la potenza di segnale
utile demodulato
sd(t) = 12πkf ddtα(t), e
Pνd è la potenza del rumore demodulato calcolata alla
(14.97).
Ricordando (§
11.2.2) che
α(t) = 2πkf ∫t−∞m(τ)dτ, per la potenza di
sd(t) si ottiene
Psd = Pm = ∫W − WPm(f)df, e quindi
SNRd = PsdPνd = Pm23 N0(kfA)2W3 = 3 Pmk2fW2N0W A22 = 3 σ2fdW2 PxN0W = 3 β2 SNR0
avendo sostituito
Pmk2f con
σ2fd (vedi sotto),
A22 con la potenza della portante ricevuta
Px,
σfdW con l’indice di modulazione
β (§
12.3.3.4), e
PxN0W con l’
SNR di sistema SNR0 (§
14.1.4). Il risultato ottenuto conferma la seconda affermazione di inizio sezione: si ha un
miglioramento rispetto all’
SNR0 (e dunque rispetto all’
am)
tanto maggiore quanto maggiore
è la banda occupata dal segnale modulato
BRF ≃ 2W(β + 1) (eq.
(14.56) a pag.
1), ovvero quanto più è grande l’indice di modulazione
β.
Per mostrare che
Pmk2f = σ2fd, indichiamo con
fd(t) = fi(t) − f0 la
deviazione della frequenza
istantanea
fi(t) (§
12.3) rispetto a quella della portante
f0. Ricordiamo quindi che
fi(t) = 12π ddt ψ(t) in cui
ψ(t) è la fase istantanea
ψ(t) = 2πf0t + α(t), e dato che per l’
fm α(t) = 2πkf ∫t−∞m(τ)dτ si ottiene
fd(t) = 12π ddt⎛⎜⎝2πf0t + 2πkft⌠⌡ −∞m(τ)dτ⎞⎟⎠ − f0 = f0 + kfm(t) − f0 = kfm(t)
Pertanto si ha
σ2fd = k2fσ2m = k2fPm se
m(t) è a media nulla: praticamente,
σfd rappresenta la
deviazione standard della frequenza istantanea, e per questo è una grandezza proporzionale alla larghezza di banda del segnale modulato. D’altra parte, questo risultato è un aspetto della conversione
am-fm che avviene per alto indice di modulazione, come descritto al §
12.3.3.3.
Discussione del risultato
Notiamo innanzitutto che se
β < 1√3 ≃ 0, 58 il valore di
SNR = 3β2SNR0 non aumenta affatto, anzi le prestazioni peggiorano. Ma con bassi indici di modulazione abbiamo già visto (§
12.3.3.1) che l’
fm ha un comportamento che può avvicinarsi a quello lineare dell’
am, e dunque ci possiamo
non-sorprendere. D’altra parte,
SNR può migliorare (e di molto) con
β > 1√3: se ad esempio
β = 5 si ottiene
3β2 = 75 volte meglio, ovvero 17,75 dB di miglioramento! In compenso, la regola di Carson ci dice che la banda occupata aumenta di circa
2(β + 1) = 12 volte quella di banda base... dunque il miglioramento di SNR avviene
a spese dell’occupazione di banda, e pertanto costituisce una manifestazione del
compromesso banda-potenza, vedi pagg.
1 e
1.
Verrebbe ora quasi il desiderio di aumentare indefinitamente β (nei limiti della banda disponibile) per migliorare a piacere l’SNR. Peccato non sia possibile, dato che ad un certo punto l’analisi effettuata perde validità: infatti, aumentando β anche la banda di rumore del ricevitore deve crescere, essendo aumentata la banda del segnale modulato. Pertanto le condizioni Px = A22 ≫ σ2νc = σ2νs = N0BN non sono più verificate, con le conseguenze illustrate di seguito.
14.3.3 Caso di elevato rumore
Qualora il valore efficace del rumore in ingresso al discriminatore sia confrontabile con quello del segnale utile ricevuto si verifica un
effetto soglia,
ed all’aumentare del rumore l’
SNR degrada molto rapidamente. Per indagarne le cause facciamo riferimento allo schema a lato, che mostra l’inviluppo complesso della portante non modulata
A, del rumore in ingresso
ν(t), e del segnale ricevuto
r(t), notando che se i valori efficaci dei primi due sono comparabili, può verificarsi il caso che
r(t) ruoti
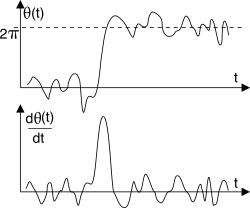
attorno all’origine. Quando ciò si verifica, a valle del derivatore che è presente nel discriminatore si determina un
click, ovvero un segnale impulsivo di area pari a
2π, come illustrato alla figura
14.13-a. Questo fatto è facilmente verificabile, ascoltando una radio
fm broadcast, che in condizioni di cattiva ricezione manifesta la comparsa di un rumore, appunto, impulsivo.
All’aumentare della potenza di rumore, aumenta la frequenza con la quale
r(t) “aggira” l’origine, e pertanto aumenta la frequenza dei
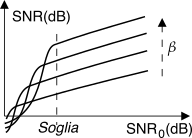
click, che tendono a produrre un crepitìo indistinto. Si è trovato che questo effetto si manifesta a partire da un
SNR0 di sistema inferiore a 10-25 dB, e per valori
SNR0 minori di tale valore l’effetto aumenta molto rapidamente, cosicché si parla di
effetto soglia. Le curve di
14.13-b riportano un tipico andamento dell’
SNR dopo demodulazione, con l’indice
β che svolge il ruolo di parametro, e possiamo osservare come con un
SNR0 inferiore alla soglia le prestazioni degradino rapidamente. Si è trovato che demodulando con un PLL, anziché con un discriminatore, il valore di soglia si riduce di circa 3 dB.
Nella pratica comune il segnale di rumore può essere costituito da una interferenza dovuta ad una emittente adiacente (ossia con una portante prossima a quella della emittente sintonizzata) che sovramodula, ovvero adotta un indice di modulazione troppo elevato, ed invade la banda delle emittenti contigue.
Esercizio
-
Sia dato un trasmettitore FM con potenza trasmessa 1 Watt e segnale modulante m(t) con banda ± W = ±10 MHz. Un collegamento con attenuazione disponibile Ad = 100 dB lo interfaccia ad un ricevitore con temperatura di sistema Tei = 2900 oK. Desiderando un SNR = 40 dB, calcolare:
1) Il fattore di rumore del ricevitore in dB;
2) Il minimo valore dell’indice di modulazione e la banda occupata a radiofrequenza BRF;
3) Se il valore di β trovato in 2) non sia troppo piccolo, e quale sia il suo massimo valore;
4) Il nuovo valore β’, volendo dotare il collegamento di un margine pari a 25 dB.
Soluzione
-
1) Questa domanda va affrontata dopo lo studio del §
18.2, dove è mostrato che
Tei = T0(F − 1) + Tg = T0F se
Tg = T0; assumiamo quest’ipotesi per vera e dunque
F = TeiT0 = 10; pertanto
FdB = 10 dB. Per proseguire l’esercizio con le nozioni fin qui acquisite, esplicitiamo che
Pn(f) = N02 = 12kTei = 12 ⋅ 1.38 ⋅10 − 23 ⋅ 2900 ≃ 2 ⋅ 10 − 20 Watt/Hz.
2) Qui è utilizzata la relazione
WR = WTGd dal §
19.1, in modo da scrivere
SNR = 3β2SNR0 = 3β2WRN0W = 3β2WTGdN0W;
il valore numerico di
SNR risulta
10SNRdB10 = 104, mentre quello di
Ad è
10Ad(dB)10 = 1010 e quindi
Gd = 1 ⁄ Ad = 10 − 10. Sostituendo i valori, ed invertendo la relazione, si ottiene
βmin = √SNR ⋅ N0W3 ⋅ WTGd = √104 ⋅ 4 ⋅10 − 20 ⋅ 1073 ⋅ 10 − 10 = 3.65
Applicando la regola di Carson per la banda:
BRF ≃ 2W ⋅ (β + 1) = 2 ⋅ 107 ⋅4.65 = 9.3 ⋅ 107 = 93 MHz.
3) La validità dei risultati 2) dipende dal verificarsi delle condizioni di basso rumore, ovvero deve risultare
WR ≫ σ2νc = σ2νs = N0BN = N0BRF = 4 ⋅ 10 − 20 ⋅ 9.3 ⋅107 = 3.72 ⋅ 10 − 12 Watt,
ma poiché
WR = WTAd = 11010 = 10 − 10, si ha
WRσ2νc = 10 − 103.72 ⋅ 10 − 12 = 26, che soddisfa abbastanza bene l’esigenza di
basso rumore. Per trovare
βMax partiamo dal vincolo che debba risultare
WR ≥ 10 ⋅ σ2νc = 10 ⋅ N0 ⋅ BRF = 10 ⋅ N0 ⋅2W ⋅ (βMax + 1)
da cui otteniamo
βMax = WR10 ⋅ N0 ⋅2W − 1 = 10 − 108 ⋅ 10 − 12 − 1 = 12.5 − 1 = 11.5
al quale corrisponde una banda
BRF = 2W ⋅ (βMax + 1) = 2 ⋅ 107 ⋅12.5 = 250 MHZ,
ed un guadagno di
SNR = 10lg103β2Max ≃ 26 dB, mentre con
βmin nominale si sarebbe ottenuto
10lg10(3 ⋅ 3.652) = 16 dB.
4) Il concetto di margine è introdotto al §
19.1; un margine di 25 dB equivale a far fronte ad una attenuazione supplementare
Ad’ = 102.5 = 316 volte. Proviamo ad ottenere lo stesso
SNR con un nuovo valore
β’: SNR = 104 = 3β’2 WTGdGd’N0W = 3β2WTGdN0W β’2β2Gd’ ;
dunque deve risultare
β’2β2 Gd’ = 1 e quindi
β’2 = β2√1Gd’ = 3.65√316 = 3.65 ⋅ 17.7 = 64.88
.... non ce la facciamo. Infatti, al più (con
β = βMax = 11.5) si ha un margine di 10 dB.
14.3.4 Enfasi e de-enfasi
Abbiamo osservato che in presenza di rumore bianco in ingresso, il rumore dopo demodulazione ha un andamento parabolico. Questo comporta che, se il messaggio modulante m(t) avesse una densità spettrale Pm(f) a sua volta bianca, l’SNR(f) alle frequenze più elevate sarebbe molto peggiore del suo valore per frequenze inferiori. Nella pratica, si possono verificare (ad esempio) i seguenti problemi:
- Nelle trasmissioni fdm-fm (vedi § 11.1.1.2), in cui più canali vengono modulati am-blu, multiplati in frequenza, e ri-modulati congiuntamente in fm a basso indice, i canali agli estremi della banda fdm sono più rumorosi;
- nell’fm broadcast (vedi § 25.2), il segnale modulante è molto più ricco di energia alle basse frequenze, dunque il problema del rumore elevato in alta frequenza è aggravato dal “basso segnale”.
Il rimedio a tutto ciò consiste nel modificare m(t) mediante un circuito detto di enfasi, in quanto il suo ruolo è quello di enfatizzare le frequenze più elevate. In tal modo anche m(t) presenta uno spettro parabolico e l’SNR sarà lo stesso a tutte le frequenze! L’alterazione introdotta su m(t) viene quindi rimossa mediante una rete di de-enfasi posta in ricezione (praticamente un integratore, ovvero un passa-basso) tale da ripristinare l’originale sagoma spettrale del segnale, rendendo la densità di potenza del rumore costante in frequenza.
Con un po’ di riflessione, ci si accorge che l’uso di una coppia enfasi-deenfasi equivale ad effettuare una trasmissione a modulazione di fase (vedi pag.
1). In realtà, la rete di enfasi non è un derivatore perfetto (altrimenti annullerebbe le componenti del segnale a frequenza prossima allo zero), ed esalta le frequenze solo se queste sono maggiori di un valore minimo. Pertanto, si realizza un metodo di modulazione “misto”,
fm in bassa frequenza e
pm a frequenze (di messaggio) più elevate.