6.3 Processi stazionari ed ergodici
Dopo aver descritto come caratterizzare statisticamente i valori di v.a. singole o vettoriali, occupiamoci del caso in cui si voglia descrivere da un punto di vista probabilistico un intero segnale, la cui reale identità non sia nota a priori.
Un segnale siffatto viene detto
membro (o realizzazione) di un
processo aleatorio, e può essere indicato come
x(t, θ), mediante una descrizione formale che prevede una coppia di insiemi: il primo di questi è l’insieme
T degli istanti temporali (tipicamente entro un intervallo) su cui sono definiti i membri del processo, mentre il secondo è relativo ad una variabile aleatoria
Θ, i cui valori
θ identificano ognuno una particolare realizzazione del processo. Pertanto, una specifica realizzazione
θi della v.a.
Θ indicizza il processo, i cui membri
x(t, θi), con
t ∈ T, sono noti solo dopo la conoscenza di
θi ∈ Θ (). Il processo aleatorio è quindi definito come l’insieme dei segnali
{x(t, θ)}, con
t ∈ T e
θ ∈ Θ.
Se viceversa fissiamo un particolare istante temporale
tj, il valore
x(tj, θ) è una variabile aleatoria, la cui realizzazione dipende da quella di
θ ∈ Θ; pertanto, è definita la densità
pX(x(tj)) (indipendente da
θ), che possiamo disegnare in corrispondenza dell’istante
tj in cui è prelevato il campione; a tale riguardo, si faccia riferimento alla figura
6.10, che mostra le densità di probabilità definite e riferite a membri di un processo.
6.3.1 Momento come media di insieme
Consiste nel
valore atteso di una
potenza n-esima dei valori del segnale, eseguito rispetto alla variabilità dovuta a
Θ, ed è pertanto calcolata come
m(n)X(tj) = EΘ{xn(tj, θ)} = ∞⌠⌡ −∞xn(tj, θ)pΘ(θ)dθ = ∞⌠⌡ −∞xnpX(x(tj))dx
in cui l’ultima eguaglianza indica come la variabilità statistica di
xn sia completamente descritta dalla d.d.p.
pX(x(tj)) di
x(tj, θ) al variare di
θ ∈ Θ, mostrata in basso in fig.
6.10. Notiamo che secondo questo approccio, la media di insieme dipende dall’istante
tj in cui è prelevato un valore.
6.3.2 Media temporale
In alternativa, possiamo fissare una particolare realizzazione
θi di
Θ, e quindi concentrare l’attenzione su di un singolo membro
x(t, θi), che è ora un segnale
certo: per esso possono quindi essere calcolate le
medie temporali, indicate con una linea sopra alla quantità di cui si calcola la media
(.):
xn(t, θi) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2xn(t, θi)dt
In particolare, troviamo il
valore medio (pag.
1)
x(t, θi) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2x(t, θi)dt
e la
potenza (eq.
(1.1)) (
o media quadratica)
x2(t, θi) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2x2(t, θi)dt
Notiamo che una generica media temporale:
- non dipende dal tempo;
- è una variabile aleatoria, in quanto dipende dalla realizzazione di Θ.
6.3.3 Media temporale calcolata come media di insieme
L’estrazione da
x(t, θi) di un valore ad un istante casuale
t ∈ T definisce una ulteriore variabile aleatoria, descritta dalla densità di probabilità (condizionata)
pX(x ⁄ θi), che disegniamo a fianco dei singoli membri mostrati in fig.
6.10. Qualora la
pX(x ⁄ θi) sia nota, le medie temporali di ordine
n possono essere calcolate (per quel membro) come i rispettivi momenti:
xn(t, θi) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2xn(t, θi)dt = ∞⌠⌡ −∞xnpX(x ⁄ θi)dx = EX ⁄ Θ = θi{xn} = m(n)X(θi)
Ciò equivale infatti ad effettuare una media ponderata, in cui ogni possibile valore di
x è pesato per la sua probabilità
pX(x ⁄ θi)dx (vedi l’esempio a pag.
1).
6.3.4 Processo stazionario
Qualora
pX(x(tj)) non dipenda da
tj, ma risulti
pX(x(tj)) = pTX(x) per qualsiasi
tj ∈ T, il processo
{x(t, θ)} è detto stazionario
in senso stretto. In tal caso tutte le medie di insieme non dipendono più dal tempo, ossia
m(n)X(t) = m(n)X per
∀t ∈ T, e le
pX(x(tj)) in basso in fig.
6.10 sono tutte uguali.
Se invece sono solamente le prime due medie di insieme
mX(t) e
m(2)X(t) a non dipendere da
t, il processo
{x(t, θ)} è detto stazionario
in media ed
in media quadratica, od anche stazionario
in senso lato. Nel caso di un processo gaussiano (§
6.5.3), la stazionarietà in senso lato implica quella in senso stretto .
Supponiamo ora di suddividere il membro
x(t, θi) in più intervalli temporali, e di calcolare per ciascuno di essi le medie temporali, limitatamente al relativo intervallo. Nel caso in cui queste risultino uguali tra loro, e di conseguenza uguali alla media temporale
m(n)X(θi), il membro è (individualmente) stazionario. Ovviamente, se tutti i membri sono individualmente stazionari, lo è anche il processo a cui appartengono.
6.3.5 Processo stazionario ed ergodico
Questa importante sottoclasse di processi stazionari identifica la circostanza che
ogni membro del processo è statisticamente rappresentativo di tutti gli altri. Ciò si verifica quando la densità di probabilità (a destra in fig.
6.10) dei valori estratti da un singolo membro
pX(x ⁄ θi) è sempre la stessa, indipendentemente dal particolare
θi, ottenendo in definitiva
pX(x ⁄ θi) = pΘX(x) indipendentemente dalla realizzazione e, per la stazionarietà, anche
pX(x ⁄ tj) = pTX(x), e dunque
pΘX(x) = pTX(x) = pX(x). In questo caso le medie temporali
m(n)X(θi), calcolabili come momenti sulla singola realizzazione come illustrato al §
6.3.3, sono identiche per tutti i membri
θi, ed identiche anche alle medie di insieme
m(n)X(tj) calcolate per un qualunque istante. Enunciamo pertanto la definizione:
Un processo stazionario è ergodico se la media temporale calcolata su di una qualunque realizzazione del processo, coincide con la media di insieme relativa ad una variabile aleatoria estratta ad un istante qualsiasi (per la stazionarietà) dall’insieme dei suoi membri.
Esempio: la potenza di segnale Mostriamo come il calcolo della potenza di un membro di un processo ergodico sia equivalente a quello del momento di 2
o ordine del processo:
PX(θ) = x2(θ) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2x2(t, θ) dt = ∞⌠⌡ −∞x2 pX(x ⁄ θ) dx = = ∞⌠⌡ −∞x2 pX(x) dx = m(2)X = E{x2} = PX
Questo risultato mostra come sia possibile calcolare la potenza di una realizzazione di un processo, senza conoscere la forma d’onda dei suoi membri.
Esempio: il valore medio A pag. 1 è stato definito come
x = limT → ∞ 1 T ∫T ⁄ 2 − T ⁄ 2x(t)dt, ovvero come una media
temporale del primo ordine. Qualora
x(t) sia membro di un processo ergodico, tale valore può esser calcolato anche come
valore atteso di
x(t), ovvero momento
di primo ordine mx della v.a.
x estratta dal processo:
x(θ) = limT → ∞ 1 T T ⁄ 2⌠⌡ − T ⁄ 2x(t, θ) dt = ∞⌠⌡ −∞x pX(x ⁄ θ) dx = = ∞⌠⌡ −∞x pX(x) dx = E{x} = mX
Potenza
, varianza
, media quadratica
e valore efficace
In particolare osserviamo che in base alla
(10.119) possiamo scrivere
e per i segnali a media nulla (
mx = 0) si ottiene
PX = σ2x; in tal caso il valore efficace (pag.
1)
√ PX coincide con la deviazione standard
σx. La radice della potenza è inoltre spesso indicata come
valore RMS (
root mean square), definito come
xRMS = √x2(t) , ovvero la radice della
media quadratica (nel tempo). Se il segnale è a media nulla,
xRMS coincide quindi con il valore efficace; se
x(t) è membro di un processo ergodico a media nulla,
xRMS coincide con la deviazione standard.
6.3.6 Riassumendo
- Se un processo è ergodico, è anche stazionario, ma non il viceversa. Esempio: se x(t, θ) = Cθ pari ad una costante (aleatoria), allora è senz’altro stazionario, ma pX(x ⁄ θ) = δ(x − Cθ), e quindi non ergodico.
- Se un processo è ergodico è possibile:
- calcolare le medie di insieme in forma di medie temporali a partire da una singola realizzazione oppure
- ottenere le medie temporali di una qualunque realizzazione a partire dalle medie di insieme, disponendo della statistica pX(x), e anche
- stimare la d.d.p. a partire dall’istogramma dei valori estratti da un qualunque membro.
- Se l’eguaglianza tra medie di insieme e temporali sussiste solo fino ad un determinato ordine e non oltre, il processo non è ergodico in senso stretto. Per ciò che concerne le telecomunicazioni, è spesso sufficiente la proprietà di ergodicità in senso lato, ovvero limitata al 2o ordine, che garantisce x(t) = E{x} = mx; x2(t) = E{x2} = m(2)x.
6.3.7 Processo ad aleatorietà parametrica
A volte può convenire pensare un segnale certo come rappresentante di una intera classe di segnali che definiscono un processo ergodico, in modo da poter calcolare le medie temporali che lo riguardano mediante delle medie di insieme. In tal caso si rientra nella categoria di processi
parametrici {x(t, θ)} in cui la v.a.
θ compare in modo
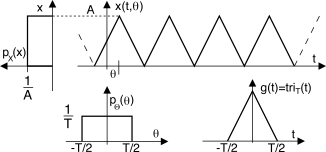
esplicito nella espressione analitica dei segnali membri. Ad esempio, il segnale periodico
rappresentato alla figura di lato, ha come parametro aleatorio un ritardo
θ, che ne rende imprecisata la fase iniziale. Se
θ è (come in figura) una v.a. a distribuzione uniforme tra
− T⁄2 e
T⁄2 (ovvero
pΘ(θ) = 1 T rectT(θ)), allora il processo
(10.126) risulta stazionario ed ergodico. Infatti scegliendo ad esempio una
g(t) = triT(t) la d.d.p. per una v.a. estratta dal processo ad un istante qualunque diviene pari a
uguale cioè alla d.d.p. ottenibile estraendo una v.a. da un membro qualunque.
Esercizio Possiamo verificare la coincidenza tra medie temporali e di insieme, osservando che il valor medio
mX = E{x} di un qualunque membro di
(10.126) è pari alla media temporale
A2, la varianza è pari a quella della d.d.p. uniforme
σ2X = A2 12 (§
6.2.3), e la potenza vale
Se la pΘ(θ) fosse stata diversa, il processo avrebbe perso stazionarietà e quindi ergodicità. Infatti, ponendo ad esempio pΘ(θ) = 2 T rect T 2 (θ) e volendo ottenere una media di insieme considerando i possibili membri del processo nell’intervallo temporale − T⁄4 < t < T⁄4, tutte le realizzazioni avrebbero valori maggiori del valor medio A2.
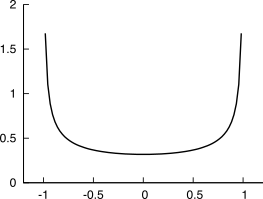
Si tratta di un processo ad aleatorietà parametrica, i cui membri
hanno espressione
x(t, θ) = Acos(2πf0t + θ)
dove
θ è una v.a. uniforme con d.d.p.
pΘ(θ) = 12π rect2π(θ). In tal caso il processo è stazionario ed ergodico, ed a pag.
1 si dimostra che un valore estratto a caso da un membro qualsiasi è una v.a. con d.d.p.
mostrata in figura
6.12, la cui sagoma è detta
a vasca da bagno (
bathtube).
Anticipiamo l’espressione
(21.1) a cui aggiungiamo un elemento di indeterminazione per quanto riguarda la relazione temporale tra l’origine dei tempi e gli istanti caratteristici, scrivendo
con
θ v.a. a distribuzione uniforme tra
± T2, in modo da rendere il processo ergodico. Mentre il calcolo della sua densità di potenza sarà affrontato al §
7.2.5, qui ci limitiamo ad osservare che, considerando i valori
an come determinazioni di v.a. indipendenti ed identicamente distribuite, la densità di probabilità di
x(t) può euristicamente essere desunta dalla analisi del corrispettivo diagramma ad occhio (§
15.1.2.3). Ad esempio, nel caso di
g(t) rettangolare e
an a due livelli equiprobabili (vedi fig.
15.7 a pag.
1) la
pX(x) sarà costituita da due impulsi di area
1⁄2, mentre nei casi di limitazione in banda e/o adozione di un impulso con caratteristica a coseno rialzato, la stessa assumerà un andamento continuo.