7.4 Filtraggio di segnali e processi
Il teorema di
Wiener §
7.2.1 ha fornito un approccio unificato alla definizione di spettro di potenza in virtù del suo legame con la funzione di autocorrelazione per tutti i tipi di segnale, compresi i processi. Riprendiamo quindi l’analisi iniziata al §
3.5.1 estendendola alla classe dei segnali aleatori, per arrivare a descrivere dal punto di vista spettrale e statistico l’uscita di un filtro con risposta impulsiva
h(t), ovvero ad
y(t) = x(t) * h(t), per i casi di segnale in ingresso di energia, periodico od aleatorio.
7.4.1 Densità spettrale in uscita da un filtro
Valutiamo innanzitutto il risultato per la densità di energia Ey(f) di uscita (e la rispettiva energia Ey) per ingresso di energia, oppure Py(f) e Py qualora in ingresso sia presente un segnale x(t) di tipo periodico, di potenza, od un processo.
Sappiamo che per il teorema di Parseval risulta
Ey(f) = Y(f)Y*(f); dato poi che
Y(f) = X(f)H(f), allora possiamo scrivere
Ey(f) = X(f)H(f) X*(f)H*(f) = |X(f)|2|H(f)|2 = = Ex(f)|H(f)|2
e dunque
la densità di energia dell’uscita è pari al prodotto tra quella in ingresso e |H(f)|2. A questo punto, eseguendo l’antitrasformata di Fourier di ambo i membri e ricordando la
(10.52), si ottiene:
Ry(τ) = F −1{Ey(f)} = F −1{Ex(f)|H(f)|2} = = Rx(τ) * Rh(τ)
ovvero
l’autocorrelazione dell’uscita di un filtro è pari alla convoluzione tra l’autocorrelazione dell’ingresso e quella della risposta impulsiva
Anticipiamo che questo risultato è valido (nei rispettivi termini) anche per i casi di segnale periodico ed aleatorio. Quindi, notiamo che
|H(f)|2 può essere anche vista come la
densità di energia del filtro , ovvero
|H(f)|2 = Eh(f) = F {Rh(τ)}.
A corollario sussistono le seguenti uguaglianze, tutte equivalenti ai fini del calcolo dell’energia totale:
In questo caso il segnale di ingresso
x(t) si può esprimere nei termini di una serie di Fourier
x(t) = ⎲⎳n Xne j2πnFt
a cui corrisponde una trasformata
X(f) = ∑nXn δ(f − nF) (vedi eq.
(10.42) a pag.
1) ed una densità di potenza
Px(f) = ∑|Xn|2 δ(f − nF) (vedi eq.
(10.160)).
Anche il segnale di uscita
y(t) è periodico, ed i suoi coefficienti di Fourier
Yn possono esprimersi nei termini di quelli dell’ingresso
Xn e dei valori della risposta in frequenza (vedi §
3.5.1) come
Yn = XnH(nF), ovvero in modulo e fase come
|Yn| = |Xn||H(nF)|; arg(Yn) = arg(Xn) + arg(H(nF))
Dato che la densità di potenza di
y(t) risulta pari a
Py(f) = ∑n|Yn|2δ(f − nF), si ottiene
Py(f) = ⎲⎳|Xn|2|H(nF)|2δ(f − nF) = |H(f)|2 Px(f)
Di nuovo, antitrasformando si ottiene
Ry(τ) = Rx(τ) * Rh(τ).
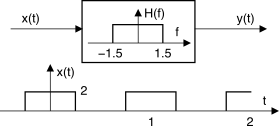
Sia dato il filtro in figura con H(f) = rect3(f) ed al cui ingresso viene posto il segnale x(t) = 2 ∑∞n = −∞rect1 2 (t − n) Calcolare:
- la potenza in ingresso Px,
- la potenza in uscita Py,
- l’espressione di y(t).
1) Calcoliamo la media temporale:
Px = 1 T ∫T ⁄ 2 − T ⁄ 2x2(t)dt = 1 T ∫1 ⁄ 4 − 1 ⁄ 422(t)dt = 4 2 = 2
dato che
T = 1;
2) Sappiamo che
Py = ∫∞−∞Py(f)df, in cui
Py(f) = Px(f)|H(f)|2, ed essendo
x(t) periodico, si ha
Px(f) = ∑n|Xn|2δ(f − nF). Per determinare i coefficienti della serie
Xn, calcoliamo
X(f) = F {2rectτ(t) * ∑∞n = −∞δ(t − nT)} = 2τ ⋅ sinc(fτ) 1 T ∑∞n = −∞δ⎛⎝f − nT⎞⎠
ed essendo
τ = 12 e
T = 1, risulta
X(f) = sinc⎛⎝f 2 ⎞⎠ ∑∞n = −∞δ(f − n) = ∑∞n = −∞Xnδ(f − n)
con
Xn = sinc⎛⎝n2⎞⎠. Dunque, dato che gli unici impulsi che cadono entro la risposta in frequenza
H(f) sono quelli per
f = − 1, 0 e
1, si ha:
Py(f) = Px(f)|H(f)|2 = ∑1n = −1|Xn|2|H(n)|2δ(f − n)
e pertanto si ottiene
Py = ∫∞−∞Py(f)df = ⎛⎜⎜⎝sin − π2 − π2 ⎞⎟⎟⎠2 + 1 + ⎛⎜⎜⎝sinπ2 π2 ⎞⎟⎟⎠2 = 1 + 2⎛⎝2 π ⎞⎠2 = 1.811
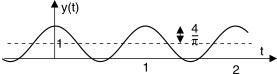
3) Considerando
nuovamente che
T = 1⁄F = 1, e che risulta
Xn = ⎧⎩2 π , 1, 2 π ⎫⎭, si ottiene
y(t) = ∑1n = −1 XnH(n)e j2πnt = 1 + 2 π (e j2πt + e −j2πt) = 1 + 4 π cos2πt
Notiamo come il filtro lasci passare solamente la componente continua e la prima armonica.
Processi ergodici e segnali di potenza
Anche in questo caso (in appendice
7.7.5) si verifica che
m(1, 1)Y(τ) = m(1, 1)X(τ) * Rh(τ), e dunque
Il risultato ovviamente si applica a qualunque membro del processo, per i quali come noto risulta
m(1, 1)X(τ) = Rx(τ), e dunque la
(10.168) è valida anche per un qualunque segnale di potenza.
Esercizio Un processo gaussiano bianco con densità di potenza Pn(f) = N0 2 attraversa un filtro causale con h(t) = e− at. Determinare la Py(f) in uscita.
Svolgimento Sebbene al §
3.8.8 sia riportato che per questo caso risulta
|H(f)|2 = 1 a2 + 4(πf)2 e dunque
Py(f) = Px(f)|H(f)|2 = N0 2a2 + 8(πf)2 , verifichiamo di ottenere lo stesso risultato passando per la
Rh(τ), che risulta pari
a
12a e− a|τ|, da cui di nuovo otteniamo
|H(f)|2 = F {Rh(τ)} = 1a2 + 4(πf)2.
E’ il nome con cui viene più spesso indicato (vedi §
255) il rapporto
ovvero
|H(f)|2 = Ey(f) Ex(f) nel caso di segnali di energia. La
|H(f)|2 ripropone in termini energetici il legame ingresso-uscita rappresentato da
H(f) (vedi §
3.5.1). Altre volte
|H(f)|2 è anche indicato come
risposta in potenza, od anche
densità spettrale della risposta in potenza, mentre la sua identificazione con la
densità di energia del filtro Eh(f) usata a pag.
1 è una mia definizione
originale (che io sappia).
7.4.2 Caratteristiche statistiche in uscita da un filtro
Approfondiamo ora lo studio della caratterizzazione statistica dell’uscita di un filtro quando in ingresso è presente un membro di un processo ergodico, per quanto riguarda la media, la varianza, e la d.d.p. del processo in uscita.
è pari a quella dell’ingresso moltiplicata per il
guadagno in continua H(0) del filtro, in quanto
my = E{y(t)} = E{x(t) * h(t)} = E{x(t)} * h(t) = = mx∞⌠⌡ −∞h(τ)dτ = mxH(0)
la condizione di ergodicità consente di scrivere
Py = y2(t) = E{y2} = m(2)y e dunque, ricordando l’eq.
(10.119), si ha
σ2y = m(2)y − (my)2 = Py − (my)2
in cui per valutare
Py si può far uso di relazioni analoghe alle
(10.167):
Py = Ry(0) = ∞⌠⌡ −∞ Py(f)df = ∞⌠⌡ −∞Px(f)|H(f)|2df = = ∞⌠⌡ −∞Rx(τ)Rh(τ)dτ
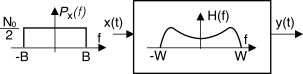
Esempio In ingresso ad un filtro
H(f) viene posto un processo
x(t) bianco con
mx = 0 e banda
B, ovvero
Px(f) = N02 rect2B(f) e quindi
Rx(τ) = N0B ⋅ sinc(2Bt). Essendo il processo a media nulla, per la varianza di uscita si ottiene
σ2y = Py = ∞⌠⌡ −∞Px(f)|H(f)|2df = N0 2 B⌠⌡ − B|H(f)|2df ≤ N0 2 Rh(0)
con il segno di uguale se la
larghezza di banda W di
H(f) è minore di
B. Per quanto riguarda la densità spettrale di potenza
Py(f) di uscita si applica la
(10.168), ottenendo
Py(f) = Px(f)|H(f)|2 = N0 2 |H(f)|2 con
|f| ≤ B: dunque il relativo processo
y(t) di uscita
non è più bianco, ed in questo caso si dice
colorato. A ciò corrisponde anche una modifica della funzione di autocorrelazione, che non è più un
sinc, ma ora vale
Ry(τ) = Rx(τ) * Rh(τ) = N0B ⋅ sinc(2Bt) * Rh(τ)
Ciò significa che mentre prima del filtro (per il processo bianco) due valori estratti in istanti multipli di
1⁄2B erano incorrelati, l’operazione di filtraggio ha introdotto
un legame tra i valori estratti a tali intervalli
.
A riguardo della
pY(y) del processo di uscita non si può dire nulla di generale, tranne che evidentemente dipende dalla
pX(x) di ingresso e dalle operazioni compiute dal filtro; la sua espressione esatta va però determinata di volta in volta. Ad esempio, nel caso di un filtro trasversale (§
5.2.1) possono applicarsi le regole di cambio variabile (§
6.4). Un caso a parte è quello dei processi gaussiani, che se posti in ingresso ad un filtro, producono in uscita un processo anch’esso gaussiano.